台湾から参加の吸引式マウスが優勝、2位との差はわずか1000分の6秒:第36回全日本マイクロマウス大会2015 レポート(2/4 ページ)
ご覧の通り両ロボットとも同じ最短経路を通っているが、「Diu-Gow」が最短走行に成功したのは1回だけだった。
マイクロマウス競技では事前にロボットへ、迷路情報が与えられていない。マイクロマウスは、中央に設けられたゴールを目指して、未知の迷路内を探索して周り、自分にとって最適なルートを見つける。そして、最速でゴールを目指し、タイムを競う。走行のチャンスは、探索を含めて5回だ。
実は「Diu-Gow」のプログラムにはバグが残っており、ゴール後にスタート地点の手前まで戻ってくると、もう一度、迷路を走り始めてしまっていた。探索のときにもこの症状が出ていた。
競技のルールで、「マイクロマウスが走行中は、中断ができない」と定められているため、Cai,Xin-Hanさんは走り回るDiu-Gowを見ているしかなかった。ちなみに、それまでの走行した迷路情報を削除すれば、審査員に合図をしてマイクロマウスを停止できる。もちろん、その場合は、迷路の探索からやりなおさなければならない。
Diu-Gowは2回目と4回目の走行時、画面の左上から真っすぐ斜め右下に入るところで、クラッシュした。ゴール後に周回するバグで時間を消費したため、5回目にチャレンジする前に制限時間の5分が終了。結果として、最短走行が1回しかできなかったわけだ。
それに対して、竹本裕太さんのQueは決勝に進出した33台の中で、唯一、5回の全走行に成功している。走るたびに細かく自己記録を更新していた。安定性では文句のないNo.1だった。
2台のマイクロマウスのスペックは、次の通りだ。
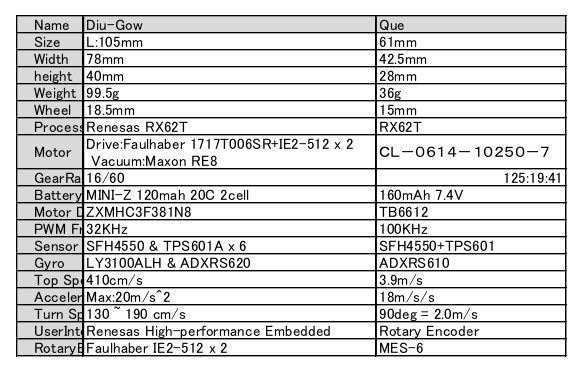 「Diu-Gow」と「Que」のスペック
「Diu-Gow」と「Que」のスペック関連記事
 吸引式マウス「紫電改」が圧倒的スピードで優勝、若手の躍進も目立つ大会に
吸引式マウス「紫電改」が圧倒的スピードで優勝、若手の躍進も目立つ大会に
世界最古とも言われるロボット競技会「全日本マイクロマウス大会」が開催された。大会には、過去最大258台のマイクロマウスが参加。マイクロマウスクラシック競技エキスパートクラスで、吸引機構を搭載した「紫電改」が優勝。その他にも、若手エンジニアの活躍が目立つ面白い大会となった。 決勝迷路は史上最長の最短経路――トップは何と7秒台、画像処理マウスも大健闘!!
決勝迷路は史上最長の最短経路――トップは何と7秒台、画像処理マウスも大健闘!!
2013年11月23、24日の2日間、流山市生涯学習センター体育館において、「マイクロマウス2013 第34回全日本マイクロマウス大会」が開催された。マイクロマウスクラシック競技(エキスパートクラス、フレッシュマンクラス)、マイクロマウスハーフサイズ競技に合計242台が出場。本稿では86台が出場したクラシック競技エキスパートクラスを中心にリポートする。 走行中の姿勢制御を実装し、目標走行時間を突破せよ!!
走行中の姿勢制御を実装し、目標走行時間を突破せよ!!
市販の組み立てキットで「マイクロマウス」の開発を進める北上くんとえみちゃん。これまで開発してきたプログラムをベースに、センサーで壁の有無を判断しながら迷路内を自律走行させることに成功しました。最終回となる今回は、さらなる安定走行を目指し、「姿勢制御」を実装します。 センサーで壁の有無を判断し、迷路内を自律走行!!
センサーで壁の有無を判断し、迷路内を自律走行!!
市販の組み立てキットで「マイクロマウス」の開発を進めている北上くんとえみちゃん。これまで開発してきたプログラムをベースに、センサーで迷路内の壁の有無を判断しながら、マイクロマウスを自律走行させる。果たしてうまく走ることができるのか!? 台形駆動で脱調を克服! ステッピングモーターをスピードアップ
台形駆動で脱調を克服! ステッピングモーターをスピードアップ
市販の組み立てキットを利用して、「マイクロマウス」の開発を進める北上くんとえみちゃん。オリジナルプログラムを作成し、ようやくマイクロマウスが走り出した。今回は、ステッピングモーターの“脱調”を克服して、より速く走らせる!
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 日本再起の旗印となるか、国産マルチモーダルAI基盤「FRONTia」が始動
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- TSMCの“Beyond 2nm”技術の現在地、「A14」で第2世代ナノシートトランジスタへ
- 大腸がんを低侵襲に治療できるESD、オリンパスが内視鏡ロボット技術で容易に
- 既設光ファイバーで450Tbps伝送に成功、周波数帯域幅を従来の4倍以上に拡大
- イチから全部作ってみよう(34)マルチプログラミングとトランザクション
- NVIDIAフアン氏が神田に現る――日本製造業巻き込む「ジャパンAI協業」祭り
- NVIDIAが「Jetson Thor」に新モジュール追加、高騰するメモリの使用量削減技術も
- インテグレーション地獄からの脱却:構造問題と「インテグレーター人権宣言」
- AIで脆弱性影響調査を自動化、管理工数を約70%削減
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。