3ステップで簡単設定、ティーチレスでばら積みピックアップが可能に――MUJIN:DMS2015
MUJINは「第26回 設計・製造ソリューション展(DMS2015)」(会期:2015年6月24〜26日)に出展し、ティーチング不要のバラ積みピッキングシステム「ピックワーカー」を紹介した。
MUJINは2015年6月24〜26日の3日間、東京ビッグサイトで開催されている「第26回 設計・製造ソリューション展(DMS2015)」に出展し、ティーチング不要のバラ積みピッキングシステム「ピックワーカー」を紹介した。
MUJINは2011年に設立された産業用ロボット向けソフトウェアおよびプラットフォームのベンチャー企業。共同創業者でありCTOを務めるローセン・ディアンコフ(Rosen Diankov)氏は、ロボットアプリケーションの動作計画のアルゴリズムをテスト・開発・展開するためのオープンソースプラットフォーム「OpenRAVE」の創設者である。
同社は「全ての人のために産業ロボットを」企業理念としており、産業用ロボットをより簡単に利用できる環境の創出を目指している。今回のDMSでは新たにピッキング知能システムとして「ピックワーカー(Pick Worker)」を出展した。
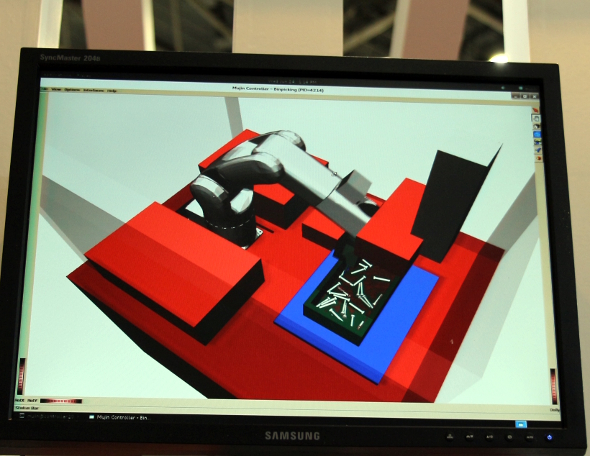
 ピックワーカーによる動作デモの様子。ティーチレスでばら積みピックアップを実現している。左奥と右奥に設置されているのが「MUJINコントローラー」
ピックワーカーによる動作デモの様子。ティーチレスでばら積みピックアップを実現している。左奥と右奥に設置されているのが「MUJINコントローラー」ティーチレスのばら積みピックアップ
ピックワーカーは、ティーチングなしで障害物をよけながらばら積み部品などのピッキングを行える産業用ロボット向けの知能システムだ。システムとしては、産業用ロボットと3次元カメラとともに、画像認識用の「MUJINコントローラー」と動作生成用の「MUJINコントローラー」を用意し、以下の3つのステップで設定を行うだけで、ティーチングを行うことなしに、産業用ロボットにピッキング作業を行わせることができる。
- 3次元CADで箱や障害物となるものを事前に登録
- ピッキングしたい対象物でロボットがつかめる場所を登録
- 対象物の搬送先を登録
ポイントは同社が開発した、“自律的判断”に近づけるアルゴリズムで、3次元CADデータにより障害物と認識したものをロボットが自律的に判断してよけて動作を行うという点だ。
ディアンコフ氏は「従来のロボットインテグレーションプロセスでは、産業用ロボットの設定を行うのに、時間がかかり非効率だった。当社のコントローラーおよびアルゴリズムを用いることで、ロボットが自律的に判断し全自動で設定できる領域が増えるため大幅に作業効率を高めることができる」と述べている。
 障害物のCADモデルは、簡略化したもので問題ないという
障害物のCADモデルは、簡略化したもので問題ないという
関連記事
 いまさら聞けない産業用ロボット入門〔前編〕
いまさら聞けない産業用ロボット入門〔前編〕
日本は「ロボット大国」とも呼ばれていますが、その根幹を支えているのが「産業用ロボット」です。それは世界の産業用ロボット市場で圧倒的に日本企業がシェアを握っているからです。では、この産業用ロボットについてあなたはどれくらい知っていますか? 今やあらゆるモノの製造に欠かせない産業用ロボットの本質と基礎を解説します。 「ロボット新戦略」が生産現場にもたらす革新とは?
「ロボット新戦略」が生産現場にもたらす革新とは?
日本再興戦略の一環として策定された「ロボット新戦略」は、2015年5月15日に新設される「ロボット革命イニシアティブ協議会」により、実現に向けた活動に入ることになる。本稿ではロボット新戦略が生産現場に何をもたらし、どういう方向性になるのかを解説する。 製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
日本政府が主催する「ロボット革命実現会議」は、ロボット活用の技術的および規制面でのロードマップを示した「ロボット新戦略」を発表した。本稿では、この新戦略の中で示されている「モノづくり」分野への取り組みにフォーカスし、その内容を紹介する。- 「第26回 設計・製造ソリューション展(DMS2015)」特集
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Factory Automationの記事ランキング
- 令和8年熊本地震による工場への影響まとめ
- 異例ヒット? 使い勝手にこだわったオムロンの“オープンな”IO-Linkマスター
- マツダが挑む設備保全DX、AIやIoTで自動車工場内火力発電所の現地点検ゼロへ
- いざ「Re:Nissan」実現へ、日産栃木工場が挑んだ「生産体制の比例化」
- 10年タイで暮らした自分が4年ぶりに現地を訪れたら……
- 機械業界の他社けん制力ランキング2025発表
- データだけ見ても人は動かない ヤマ発製造DXの失敗が生んだ現場サイエンティスト
- 自律走行ロボット第2世代 連続稼働時間3.6倍、他社製品との連携も可能
- 判定はエッジAIで完結/既存カメラをAI化、TDKの産業用ソリューション
- 次なる産業革命へ、トップはかく語りき NVIDIA/富士通/ファナック/安川/川重
コーナーリンク




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。