ボード線図を使って過渡応答と周波数応答を求める:無償ソフトで技術計算しよう【制御工学応用編】(1)(1/3 ページ)
【制御工学応用編】では、制御系の応答性や安定性を評価する方法とPIDコントローラーの設計について説明する。今回は、過渡応答と周波数応答について取り上げる。
| FreeMatでエンジニアリング計算: | |
|---|---|
| ⇒ | 入門編 |
| ⇒ | グラフィックス編 |
| ⇒ | プログラミング基礎編 |
| ⇒ | プログラミング処理編 |
| ⇒ | プログラミング応用編 |
| ⇒ | シミュレーション基礎編 |
| ⇒ | シミュレーション応用編 |
| ⇒ | 制御工学基礎編 |
【制御工学応用編】では、制御系の応答性や安定性を評価する方法とPIDコントローラーの設計について説明します。今回は、過渡応答と周波数応答について説明します。
過渡応答と周波数応答
図1はバネ・マス・ダンパ系で、図2は図1の系に周波数0.5Hzと1Hzで周期的に変動する荷重を与えた場合の変位を示したものです。
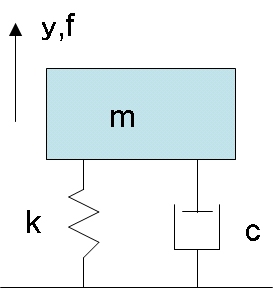 図1:バネ・マス・ダンパ系
図1:バネ・マス・ダンパ系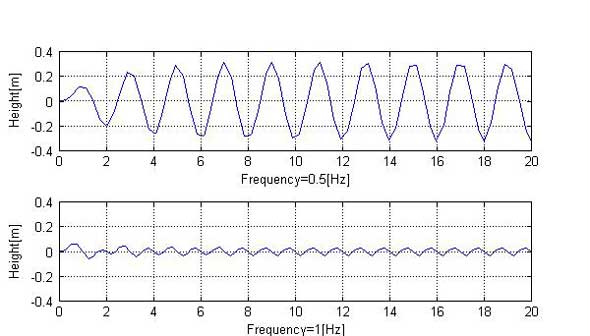 図2:バネ・マス・ダンパ系の周期的加振に対する応答
図2:バネ・マス・ダンパ系の周期的加振に対する応答下記のex506.mで計算しています。詳しくは【シミュレーション応用編】(3)をご覧ください。
clear;c=1;k=10;m=1;fr=[0.5,1];
for n=1:2
dydt=@(t,y) [y(2);(sin(fr(n)*2*pi*t)-c*y(2)-k*y(1))/m];
[t,y]=ode45(dydt,[0,20],[0;0]);
subplot(2,1,n);plot(t,y(:,1));grid('on');
xlabel(['Frequency=',num2str(fr(n)),'[Hz]']);
ylabel('Height[m]');ylim([-0.4,0.4]);
end
図2を見ると、最初の変動の後は、一定の変動となることが分かります。例えば、図2下段の1Hzでの変位は、最初は大きく、その後は規則正しい変動となっています。この最初の変動が自由応答と呼ばれ、システムの初期値や特性(この場合、m、c、kや初期変位など)に依存します。自由応答の特性を調べるのが過渡応答です。過渡応答には、幾つか種類がありますが、ここでは、インパルス応答について説明します。一方の自由応答の後の規則正しい変動は、強制応答と呼ばれ、強制力(この場合、周期的荷重)に依存します。強制応答の特性を調べるのが周波数応答です。
さて、図2で強制応答の振幅に注目すると、荷重の周波数により異なることが分かります。また、周波数が2倍の関係にあるにも関わらず、振幅の山と谷の位置がずれていることも分かります。このように、強制応答は与えられた強制力の周波数により、振幅や位相が変化します。周波数の変化に対する応答を調べるため、強制応答の特性については「周波数応答」と呼ばれています。では、図1に示すバネ・マス・ダンパ系を例に、インパルス応答、周波数応答を求めてみます。参考に、図1のバネ・マス・ダンパ系の伝達関数を下記に示します。
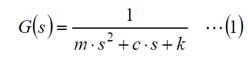
伝達関数とその求め方は【制御工学基礎編】(2)を参照してください。
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 使用中に発火、サーキュレーター10万台をリコール
- 図面AIに「動かせる3Dモデル」の生成機能、関節や可動域を自動認識
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 幾何公差の基準「データム」を理解しよう
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- Autodesk Fusionで設計した超小型衛星「PRELUDE」が軌道投入、初期運用へ







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。