サーボモータを活用してオリジナル「自動給餌器」を作ろう!:アイデア・ハック!! Arduinoで遊ぼう(11)(2/3 ページ)
まずは、サーボモータだけを動かそう!
部品の配置図(画像5)で説明したように、サーボモータを動かすだけなら、乾電池4本とサーボモータだけでOKです。
まずは、Arduinoの統合開発環境「Arduino IDE」で、サーボモータを動かすスケッチ(プログラム)を作成し、動作テストをしてみましょう(画像7、スケッチ1)。
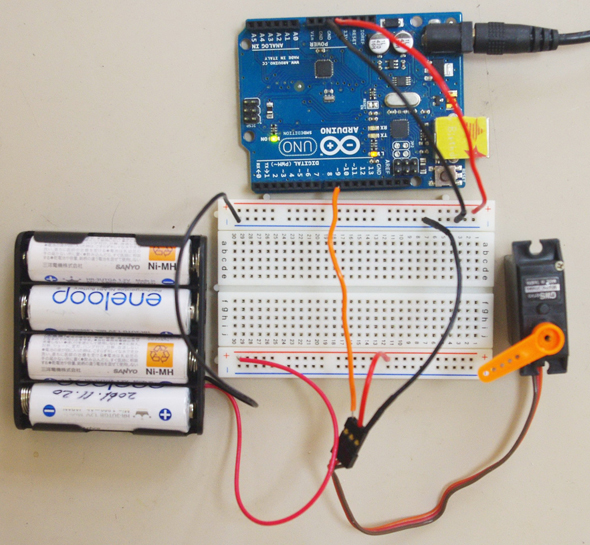 画像7 サーボモータだけを動かしてみよう
画像7 サーボモータだけを動かしてみよう
#include <Servo.h>
//-----------------------
// 定数の定義
//-----------------------
Servo myservo; // サーボオブジェクトを宣言
int pos; // サーボモータのシャフト回転位置
int servopin = 9; // サーボモータの信号線 接続ピン
void setup()
{
pinMode(servopin, OUTPUT);
myservo.attach(servopin); // 9番ピンをサーボオブジェクトに接続
myservo.write(0); // サーボモータのシャフトを0角度に指定
}
void loop()
{
for(pos = 0; pos <= 180; pos += 1) // 0〜180度まで 1度ずつ
{
myservo.write(pos); // シャフトの角度を指示
delay(50); // 50ms待機
}
for(pos = 180; pos>=0; pos-=1) // 180〜0度まで −1度ずつ
{
myservo.write(pos); // シャフトの角度を指示
delay(50); // 50ms待機
}
delay(3000); // 0度で3秒待機
}
Arduinoには、サーボモータを扱うためのライブラリが用意されています。1行目で、ライブラリ(Servo.h)を読み込んでいます。このライブラリのおかげで、難しいことを考えずに、サーボの角度を指定するだけで、モータを動かすことができます。
6行目で、Servo型オブジェクトのインスタンスを作成しています。Arduino公式サイトのライブラリのコメントによると最大で8個のサーボまで扱えるようです。7行目で、サーボモータのシャフトの角度を指定するための変数を宣言し、サーボモーターの信号線に接続するピンとして9番を宣言しています(8行目)。
「servopin」のピンモードを出力(OUTPUT)に設定し、宣言したサーボオブジェクトに接続します(12〜13行目)。これでサーボモータを使う準備は完了です。
「write()」で引数に0〜180の値を入れて、モータを動かします。ここでは、デフォルトの位置として、サーボモータを0度に設定しました(14行目)。
17行目の「loop()」内でサーボモータを動かしています。まずは、0〜180度まで1度刻みでモータを動かします(19〜23行目)。そして、180〜0度まで逆に戻します(24〜28行目)。29行目で、0度の状態をキープし、3秒間停止させています。
このスケッチ1を実行した様子が動画2です。
loop()が一通り終わって、サーボモータが「myservo.write(0)」で3秒停止しているときに、電源をカットし、サーボモータのスタート地点としています。その状態でサーボホーンを取り付けたのが動画2です。サーボホーンの初期位置がずれていると、意図した角度にモータが動きません。
スケッチ1を実行して、「やったぁ〜!! ばっちり動きました!」と言いたいところですが……。どう見ても、サーボモータの最終地点が180度ではありません。動画2では分かりにくいのですが、180度よりも広い角度まで動いています(画像8)。
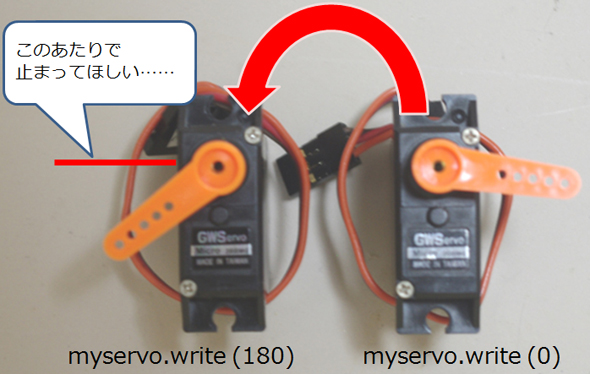 画像8 サーボモータの「write(0)」地点と「write(180)」地点
画像8 サーボモータの「write(0)」地点と「write(180)」地点調べたところ、使用しているサーボモータ(GWS Micro2BB)は、動作角が235度程度あるようです。どうやらwrite()は、動作角の235度を180分割して動かしているみたいです。このままでは、自分が意図した角度にサーボモータを動かすことができません。この状態のまま、仮にヒューマノイドロボットに適用してしまうと、まともに歩くことができないロボットが完成してしまいます。それはよろしくありません。
とはいうものの、今回は厳密な位置を指定したいわけではないので「まぁ、いっかー」としました。筆者がちゃんとした電子工作ができるようになるまでには、まだまだ勉強が必要です。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。