「この足は飾りじゃない!?」――従来タイプよりも優れた原発向け「4足歩行ロボット」を東芝が開発:ロボットとつながる小型走行車も
東芝は、東京電力・福島第一原子力発電所の原子炉建屋内の調査・復旧作業を実施する「4足歩行ロボット」と、同ロボットと有線接続可能な「小型走行車」を開発した。
» 2012年11月21日 15時18分 公開
[八木沢篤,MONOist]

東芝は2012年11月21日、東京電力・福島第一原子力発電所の原子炉建屋内の調査・復旧作業を実施/支援する「4足歩行ロボット」を開発したと発表した。カメラや線量計を搭載しており、無線による遠隔操作で原子炉建屋内の状況を把握することが可能だという。
新開発の4足歩行ロボットには、同社が独自開発した不整地や段差での歩行を制御するアルゴリズムと多関節構造が採用されており、4足で障害物を避けながら歩行するとともに、階段の上り下りも行える。これにより、従来の車輪やクローラタイプのロボットでは到達困難だった場所での作業も可能だとしている。さらに、同ロボットの活動を支援する「小型走行車」も開発。ロボットと走行車間は有線で接続され、狭い通路の先や構造物の陰にある設備・機器・配管の状態を撮影することができる。
以下に、4足歩行ロボットと小型走行車の外観と主な仕様を示す。
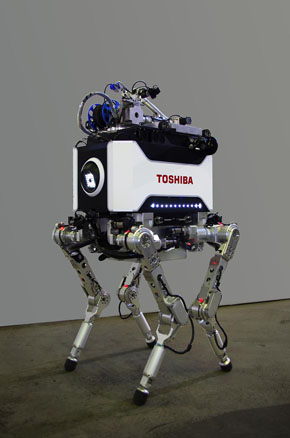
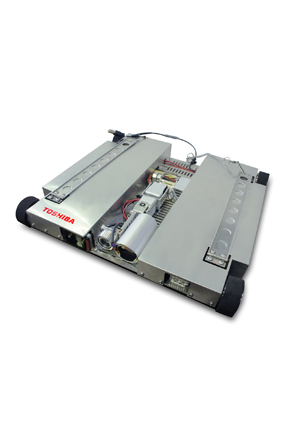 (左)新開発の「4足歩行ロボット」/(右)4足歩行ロボットと有線で接続できる「小型走行車」
(左)新開発の「4足歩行ロボット」/(右)4足歩行ロボットと有線で接続できる「小型走行車」| 装置名 | 4足歩行ロボット |
|---|---|
| 重量 | 65kg |
| 外形寸法 | 624×587×1066mm |
| 電源 | バッテリー |
| バッテリー駆動時間 | 2時間(連続歩行の場合) |
| 可搬重量 | 20kg |
| 歩行速度 | 1km/h |
| 操作方法 | 無線操作 |
| 4足歩行ロボットの概要 | |
| 装置名 | 小型走行車 |
|---|---|
| 重量 | 2kg |
| 外形寸法 | 313×327×47mm |
| 電源 | バッテリー |
| バッテリー駆動時間 | 1時間 |
| 走行速度 | 200m/h |
| 操作方法 | 親機からの有線操作 |
| 小型走行車の概要 | |
同社は引き続き、作業ロボットの技術開発を進め、遮蔽体の搬入・設置、止水作業、障害物搬出などの応用動作に対応できるよう改良を進めていくとしている。なお、同社は被災地の除染作業を支援する取り組みとして、放射線量を「赤」「黄」「緑」「青」と色の変化で可視化できる「ポータブルガンマカメラ装置」の販売および撮影サービスなども行っている(関連記事1、関連記事2)。
ロボット/ロボット開発 コーナー

あらゆる技術の集大成といわれる「ロボット」をテーマに、産業、レスキュー、生活支援/介護分野などにおけるロボット開発の実情や、関連する要素技術、研究開発、ロボットコンテスト、ロボットビジネスの最新動向などをお届けする。
関連記事
 「目に見えない放射線を“色”で可視化」――東芝、ポータブルガンマカメラ装置を開発
「目に見えない放射線を“色”で可視化」――東芝、ポータブルガンマカメラ装置を開発
東芝は放射線量を「赤」「黄」「緑」「青」と色の変化で表示できる持ち運び可能な「ポータブルガンマカメラ」装置を開発。特定に時間のかかる「ホットスポット」の発見に役立ちそうだ。 「日本はレスキューロボットを開発しても配備される状況にない!!」〜東北大・田所教授が福島原発での活動を報告
「日本はレスキューロボットを開発しても配備される状況にない!!」〜東北大・田所教授が福島原発での活動を報告
IEEE(米国電気電子学会)は「日本のロボット利用に関する現状と課題 〜福島第一原発における災害用ロボット活用事例から読み解く〜」と題したセミナーを開催。国産ロボット「Quince(クインス)」の福島第一原発における活動状況について、その詳細が語られた。そして、なぜ、国産ロボットが真っ先に投入されなかったのか、その理由が明らかに!? 「歩行型ロボットは確かにカッコいい。しかし……」――お掃除から軍事用まで手掛けるiRobot社のロボット開発
「歩行型ロボットは確かにカッコいい。しかし……」――お掃除から軍事用まで手掛けるiRobot社のロボット開発
福島第一原子力発電所 原子炉建屋内の放射線量や温度・湿度などの調査に、お掃除ロボット「Roomba(ルンバ)」を手掛ける米iRobot社の軍事用ロボットが導入され話題を呼んだ。本稿では、同社が家庭用から軍事/産業用といった異なる用途のロボット開発に取り組むに至った経緯と、同社CEOが語る日本のロボット開発について紹介する。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special ContentsPR
特別協賛PR
スポンサーからのお知らせPR
Special ContentsPR
Pickup ContentsPR
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
Special SitePR
コーナーリンク



あなたにおすすめの記事PR
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。