ロボットを遠隔操作し、優しく・素早く・安全に救助せよ!! ――14チームがレスキュー活動に挑戦:inrevium杯 第12回レスキューロボットコンテスト(1/2 ページ)
ロボットが路上のガレキを押しのけ、走路を確保しつつ、要救助者の下へと急行する――。2012年8月11、12日の2日間、神戸サンボーホールで「inrevium杯 第12回レスキューロボットコンテスト」が開催された。本稿では、大会概要と結果をお届けする。
「スリー、ツー、ワン……、レスキュー活動開始!」――。指令が発令されると同時に、基地(ロボットベース)から次々とロボットが災害現場へ向けて出動。路上のガレキを押しのけ、走路を確保しつつ、要救助者の下へと急行する……。
といっても、これは現実の災害現場の話ではない。かといって、近未来のお話でもない。2012年8月11、12日の2日間、神戸サンボーホールで開催された「inrevium杯 第12回レスキューロボットコンテスト(以下、レスコン)」の本選での一幕だ。


第12回大会の結果をお伝えする前に、レスコンの概要について簡単に説明しよう。
レスキューロボットコンテスト開催の背景にあるもの
2011年3月11日に発生した東日本大震災以来、レスキューロボットの研究開発とその活動は、一般からも多くの注目を集めるようになった。
震災直後は、海外のロボットが行方不明者の捜索や被害状況の調査などで活躍したこともあり、多くのメディアでも取り上げられ、話題に上った。その際、一部からは「『ロボット大国日本』を掲げているくせに、国産のレスキューロボットが活躍していないではないか!」という非難の声も寄せられていた。しかし、実際には、海外のロボットと同じように、国産ロボットも活動を始めており、地道に成果を挙げているのだ。実は、こうした国産ロボットの活躍を陰で支える取り組みの1つが、このレスコンなのである。

そもそも、レスコンが発足したきっかけは、1995年1月17日に発生した阪神・淡路大震災にある。あの大震災のときには、どこからもレスキューロボットが救助に来てくれなかった……。
当時、甚大な被害を受けた神戸市長田区に在住していた神戸大学のある先生は、自ら地域の救助活動に当たりながら、「なぜ、『サンダーバード(注)』が助けに来てくれないんだ!」と心の底から思ったそうだ。
あの当時、レスキューロボットが助けに来られなかったのには事情がある。実は、それまでは、レスキューロボットを研究している研究者がいなかったのだ。阪神・淡路大震災は、1948年6月28日に発生した福井地震以来、日本国内で47年振りに発生した大震災だった。
ロボット工学が生まれたのは1950年代のこと。福井地震の発生は、ロボット工学が誕生する以前のことであり、阪神・淡路大震災は日本のロボット研究者が初めて体験する大震災だった。そのため、それまでは研究者の意識がロボット工学とレスキューを結び付ける方向にいかなかったのだという。
自らレスキューロボットを研究し、開発しない限り、いざというときにサンダーバードは助けにきてくれない――。阪神・淡路大震災を通じ、そのことが明らかになったため、有志が集いロボット工学と防災工学を融合し、「レスキュー工学」を提言。そして、国際レスキューシステム研究機構(IRS:International Rescue System)を2002年に設立した。
こうした一連の活動の中から生まれたのが、このレスコンだ。レスキュー工学の立ち上げから、実用的なロボットが誕生するまでには、長い年月がかかる。そして、研究を継続するためには、若手技術者の育成も不可欠である。
そこで、次世代の研究者・技術者を育てるための手段として、高校生や高専生、大学生といった若い世代が興味を持ち、自発的に取り組む課題としてレスコンを立ち上げたのだ。同時に、若手技術者の研究活動を競技会として観客に披露することで、広く市民に対して、防災・減災の意識を高めてもらう啓発活動としての意義もレスコンには込められている。
こうした思いから誕生した競技会であるため、レスコンの大会趣旨には、“ポイントを争い優勝を競うものではないこと”が前提条件として明記されている。
ミッションは、ダミヤンを素早く発見し、優しく安全に救助すること
参加チームは、自らのレスキューコンセプトを検討し、それを実現するためのアイデアをシステム設計し、ロボットによるベストなレスキュー活動を実現しなければならない。これが大会における一番の目的である。
競技は、架空の「国際レスキュー工学研究所」内に設けられた、災害現場を模した縮尺6分の1サイズの市街地模型フィールド(実験フィールド)で実施される。フィールドには、崩れた家屋やガレキが散乱し、人形(公式愛称:ダミヤン)が救助を待っている。二次災害の恐れがあるため、人間が立ち入ることができないという設定だ。よって、チームに課せられた任務は、オペレーターが遠隔操作するロボットで、ダミヤンを素早く発見し、優しく救助して安全な場所へ運ぶことだ。詳しい、競技内容・ルールについては、レスキューロボットコンテストの公式Webサイト(競技会本選 競技について)を参照してほしい。
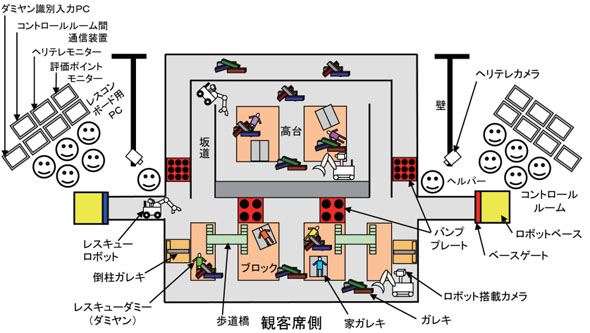 6分の1サイズの市街地模型フィールド(実験フィールド)。2チーム同時に1面の実験フィールド上で救助活動を行う。各チームのロボットは、左右のロボットベースから出動し、レスキュー活動時間(12分)内に3体のダミヤンを連れ帰らなければならない
6分の1サイズの市街地模型フィールド(実験フィールド)。2チーム同時に1面の実験フィールド上で救助活動を行う。各チームのロボットは、左右のロボットベースから出動し、レスキュー活動時間(12分)内に3体のダミヤンを連れ帰らなければならない
 (左)「(架空の)『国際レスキュー工学研究所』内に設営されている」という設定の実験フィールド。各チームが、アイデアを凝らしたロボットでレスキュー活動を実践する/(右)レスコンの影の主役である要救助者役の人形「ダミヤン」(画像中央の赤色の服を着た人形)を、救助して安全な場所へ搬送。ダミヤンは体内に搭載されたセンサーで、救助時の痛みを数値化する
(左)「(架空の)『国際レスキュー工学研究所』内に設営されている」という設定の実験フィールド。各チームが、アイデアを凝らしたロボットでレスキュー活動を実践する/(右)レスコンの影の主役である要救助者役の人形「ダミヤン」(画像中央の赤色の服を着た人形)を、救助して安全な場所へ搬送。ダミヤンは体内に搭載されたセンサーで、救助時の痛みを数値化する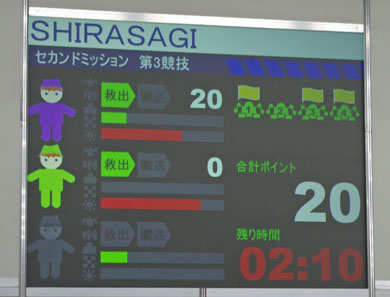 競技中は「ダミヤンインジケーター」に、救助活動の進捗状況やダミヤンの状態がリアルタイムで表示される。要救助者であるダミヤンに強い衝撃が加わると、フィジカルポイントが減少する
競技中は「ダミヤンインジケーター」に、救助活動の進捗状況やダミヤンの状態がリアルタイムで表示される。要救助者であるダミヤンに強い衝撃が加わると、フィジカルポイントが減少するCopyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。