KGDBを使って、Android組み込みボードをリモートデバッグしよう!【後編】〜USBガジェットドライバをデバッグする(3)〜:実践しながら学ぶ Android USBガジェットの仕組み(5)(3/4 ページ)
リモートデバッグする
これでリモートデバッグの準備ができました。
最初に、デバッガのセットアップを行います。そして、準備ができたら、デバッガを使ってAndroid USBガジェットのデータを参照していきます。
リモートデバッグの設定をする
KGDB over Ethernetを利用するに当たって、ターゲットボードとホストPCのIPアドレスを設定する必要があります。本稿では、次のようにIPアドレスを設定しました(表2)。
| 対象 | IPアドレス |
|---|---|
| ターゲットボード | 192.168.1.201 |
| ホストPC | 192.168.1.202 |
| 表2 ターゲットボードとホストPCのIPアドレス | |
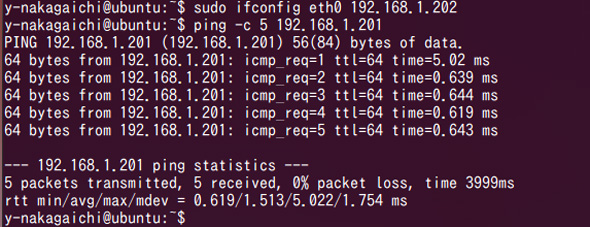
まず、ターゲットボードのコンソール上で次のコマンドを実行します。
ifconfig eth0 192.168.1.201
続いて、ホストPC上で次のコマンドを実行します。
ifconfig eth0 192.168.1.202
正しく設定されており、通信可能な状態であるかどうかを「ping」コマンドを使って確認してみましょう。次のコマンドを、ホストPC上で実行してください。
ping -c 5 192.168.1.201
グラフィカルなデバッガを使用する
それでは、“ホストPC−ターゲットボード”間で通信を行うGDBの準備です。実は、クロスコンパイラをインストールすると、「prebuild/linux-x86/toolchain/arm-eabi-4.4.0/bin/arm-eabi-gdb」が自動的に組み込まれていますので、特に何もする必要はありません。

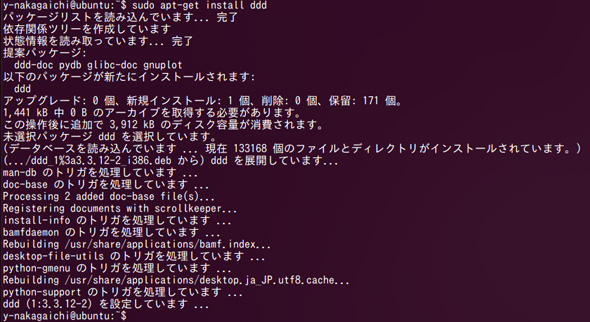
今回はグラフィカルにデバッグできるように、「ddd(Data Display Debugger)」をインストールします。単にGDBのコマンドを発行するだけならば、CUIでも十分ですが、デバッグ中の変数データのグラフィカル表示はとても見やすく、便利です。dddは、以下のようにパッケージ管理より簡単にインストールできます。
sudo apt-get install ddd
ddd(Data Display Debugger)の使い方
まずは、以下のコマンドを実行して、dddを起動しましょう。「--debugger」で、dddで使用する「gdb」コマンドを指定します。
$ ddd --debugger prebuilt/linux-x86/toolchain/arm-eabi-4.4.0/bin/arm-eabi-gdb
すると、以下のようにdddの画面が表示されます。
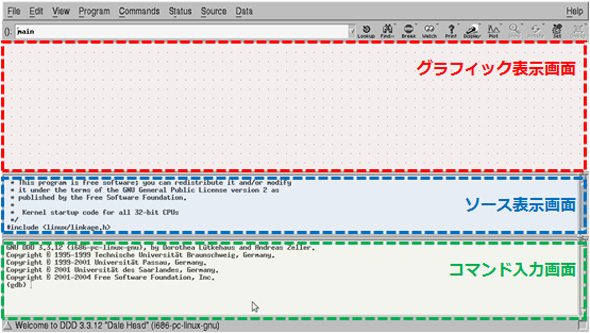
dddの画面には、大きく分けて3つの枠があります。1番上はグラフィック表示用のもので、真中がソースコード表示用、1番下が「gdb」コマンド入力用のものです。
それでは、コマンド入力画面上で、リモートデバッグを開始するためのコマンドを入力します。まずは、カーネルのシンボル情報をGDBに認識させるために「file」コマンドを実行しましょう。なお、vmlinuxは、カーネル再構築時に自動的に出来上がったものを使用します。
(gdb) file vmlinux
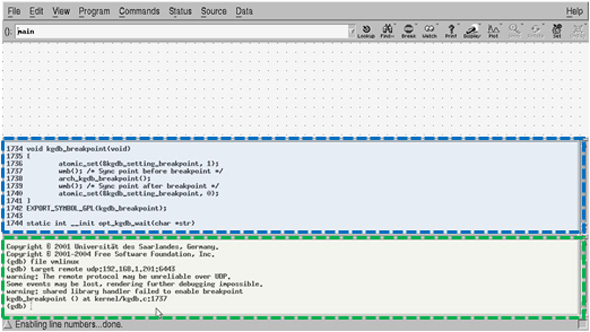
次に、以下のコマンドを実行して、ターゲットボードのデバッグを開始します。
(gdb)target remote udp:192.168.1.201:6443
上記コマンドの引数の意味は、以下の通りです。
- “192.168.1.201”……先ほど設定したターゲットボードのIPアドレス
- “6443”……KGDB通信用のポート番号
すると、以下のようにソースコード出力画面に「kgdb_breakpoint()」関数が表示され、ターゲットボード上のKGDBがGDBからのコマンド入力待ち状態になります。
これで準備が完了しました。これからGUI画面上に、カーネルのデータ構造を表示していきます。ちなみに、dddで出力した画像は、PostScriptファイルで出力されます。Windows環境では見ることができないかもしれませんので、Linuxの「ps2pdf」コマンドでPDFファイルに変換するとよいでしょう。コマンドの使用方法は、以下の通りです。
ps2pdf <PostScriptファイル> <出力したいPDFファイル>
関連キーワード
組み込みAndroid開発 | 実践しながら学ぶ Android USBガジェットの仕組み | USB | Android | 組み込み | Androidケータイ | アプリケーション開発 | Androidがもたらす組み込み開発の新たな可能性 | 組み込み開発 | 作りながら理解するファイルシステムの仕組み
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- TSMCの“Beyond 2nm”技術の現在地、「A14」で第2世代ナノシートトランジスタへ
- 大腸がんを低侵襲に治療できるESD、オリンパスが内視鏡ロボット技術で容易に
- 日本再起の旗印となるか、国産マルチモーダルAI基盤「FRONTia」が始動
- 製造業の設計開発と情シスの部門間にある「ダニング・クルーガー効果」の谷
- 既設光ファイバーで450Tbps伝送に成功、周波数帯域幅を従来の4倍以上に拡大
- 酸素供給スーツで3時間潜水するサイボーグ昆虫
- NVIDIAが「Jetson Thor」に新モジュール追加、高騰するメモリの使用量削減技術も
- インテグレーション地獄からの脱却:構造問題と「インテグレーター人権宣言」
- NVIDIAフアン氏が神田に現る――日本製造業巻き込む「ジャパンAI協業」祭り
- 先端パッケージ技術の採用加速へ、図研がTSMCのEDAアライアンスに参加
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。