Cで行う二輪倒立振子とライントレースの制御:ETロボコン2009、挑戦記(3)(2/2 ページ)
さらに正確なセンサ値を得るために
昨年取材していた際に何名かの参加者の方が「普段練習している環境と、実際にレースを行う会場との光度が違うので、うまく走行できない場合がある」といっていたのですが、今回実際に参加してみて、そのことがよく分かりました。例えば、先ほどラインを外れたときのセンサ値が約540でしたが、自宅で走行した際には600近い値でした。これでは同じプログラムを実行してもNXTはうまく走行してくれません。
NXTは構造上、RCX(昨年までメインで使用されていた走行体)よりも、環境に左右にくいような光センサになっていますが、それでも、より本番に近い環境でセンサ値を得る必要がありそうです。
(案1)LED点灯時のセンサ値を得る
まずは、走行時に点灯していたLEDを、helloworldプログラム実行時にも点灯するように書き換えます(さきほど走行していたときにはLEDが点灯していました)。
LEDの点灯は、ecrobot_set_light_sensor_active(NXT_PORT_S3);というAPIが用意されていますので、これを上記のソースコードに書き加えます。すると、LEDが点灯しました。これでより走行時に近いセンサ値を得られるようになります。
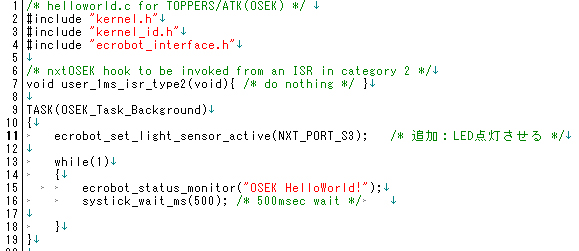 helloworldプログラムのソースコード
helloworldプログラムのソースコード 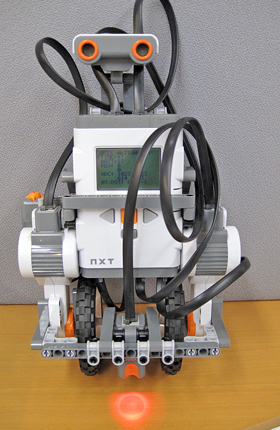 画像5 hellowordlプログラムにLED点灯を加えた後の実行の様子
画像5 hellowordlプログラムにLED点灯を加えた後の実行の様子 (案2)光センサの周りに遮光スカートを付ける
もう1つの方法は、RCXのときに多くの参加者の方が付けていた遮光スカート(センサの周りにまくもの)を使用することです。
遮光スカートを付けることで、万が一斜め横や反射されてきた光が入ってきても、遮断することができます。昨年の取材時にチーム「すねいる」さんがとてもきれいな遮光スカートを付けていましたので、それを参考にすると良いかもしれません。
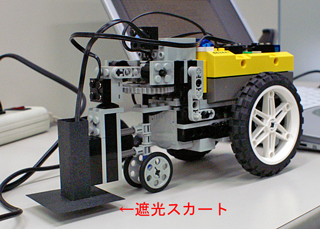 画像6 昨年参加されていたすねいるさんのRCX
画像6 昨年参加されていたすねいるさんのRCX| 関連リンク: | |
|---|---|
| ⇒ | 連載記事「ETロボコン2008〜チャンピオンシップへの道〜」 |
さて次回はついにETロボコンの核心部分である、モデルの作成に入ります。5〜6月にかけて行われた参加者向けの技術説明会の内容も踏まえ、組み込みシステム開発におけるモデリングの手法について1から学んでいきたいと思います。
関連記事
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。