今年は私も参加します! ETロボコン2009:ETロボコン2009、挑戦記(2)(1/2 ページ)
編集部に届いた1つのダンボール。その中身は新走行体のNXTだった! 新人編集者が挑む、ロボコン挑戦記が始まります。
すでにお気付きの方もいると思いますが、本連載のタイトルは「ETロボコン2009、挑戦記」。昨年からETロボコンの取材を始めた新人編集者が、今年は自ら大会にエントリーし、その軌跡をつづっていきます。
今回はロボットの組み立てから、開発環境の構築までの流れを紹介します。
編集部にロボットがやって来た!
2009年3月末日、@IT MONOist編集部に1つのダンボールが届きました。両手ですんなりと持てる重さですが、中身はだいぶ詰まっているよう。早速開けてみると……。
 画像1 「ETロボコンキットNXT-A」の外観
画像1 「ETロボコンキットNXT-A」の外観ETロボコンキットの販売代理店、アフレルから届いた「ETロボコンキットNXT-A」です。
さて、本連載の第1回「今年の新ミッションは2輪倒立ロボットの制御だ!」でも取り上げましたが、今年は2種類の走行体(LEGO Mindstorms RCX/NXT)から、どちらか一方を選択できます。@IT MONOist編集部では、今年から使用可能になった新しい方の走行体、NXTを選択することにしました。
組み立て開始
走行体の組み立ては、ETロボコン事務局から提供されている「組み立て手順書」を参考にすると、スムーズに進められます。
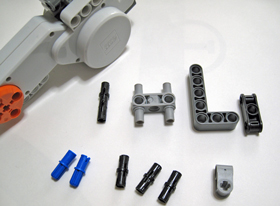
 画像2 「ETロボコンキットNXT-A」の中身
画像2 「ETロボコンキットNXT-A」の中身LEGO Mindstorms NXTは、複数のレゴ製部品を使って自在に組み立てることができるロボットです。画像2のように膨大な数の部品が用意されており、その中からETロボコン仕様の2輪倒立型のライントレースロボット用の部品を探します。
以下、組み立ての様子を写真で紹介します。
 画像3(左) 足/画像4(右) 頭
画像3(左) 足/画像4(右) 頭
 画像5(左) ジャイロセンサ/画像6(右) 胴体
画像5(左) ジャイロセンサ/画像6(右) 胴体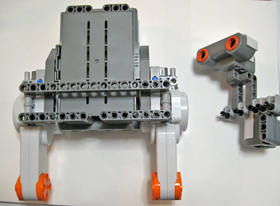
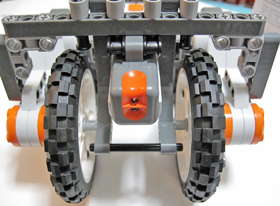 画像7(左) 背面/画像8(右) 車輪
画像7(左) 背面/画像8(右) 車輪以前、RCXを組み立てた経験のある上司から「意外と時間がかかるよ」と聞いていたのですが、まさにそのとおり。キットのうち、4分の1ほどの部品しか使用していないにもかかわらず、すべて組み立て終わるまでに約3時間も要してしまいました……。
完成したNXTはこちらです! ちなみに、まだ自律で立つことはできません。

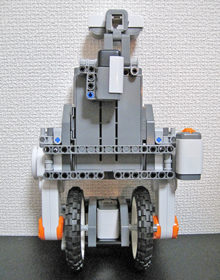 画像9(左) LEGO Mindstorms NXT(前)/画像10(右) LEGO Mindstorms NXT(後)
画像9(左) LEGO Mindstorms NXT(前)/画像10(右) LEGO Mindstorms NXT(後)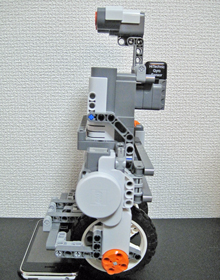
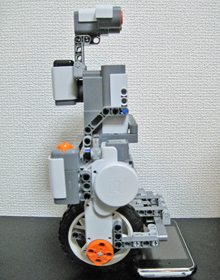 画像11(左) LEGO Mindstorms NXT(左側面)/画像12(右) LEGO Mindstorms NXT(右側面)
画像11(左) LEGO Mindstorms NXT(左側面)/画像12(右) LEGO Mindstorms NXT(右側面)| 機能 | NXT |
|---|---|
| CPU | ARM7(32ビット、48MHz) |
| メモリサイズ | ROM+RAM 64Kbytes(拡張標準ファームウェア) ROM 224Kbytes/RAM 50Kbytes(NXT BIOS) |
| デバイスI/O | センサー×4ch(A/D、I2C) モーター×3ch(分解能1度のエンコーダ内蔵) |
| 表示 | 100×64ピクセル液晶 |
| サウンド | 8bit PCM(トーン/WAV出力対応) |
| 通信 | Bluetoothマスタ/スレーブ(NXT/PCと通信可能) USBスレーブ(PCと通信可能) |
| 表 LEGO MINDSTORMS NXTの仕様 | |
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 周波数を使って熱電対センサーの測定値を安価な電線でより遠くまで伝送する
- 新画素構造で20%以上高精細化した1/2型モバイル用CMOSイメージセンサー
- TSMCの“Beyond 2nm”技術の現在地、「A14」で第2世代ナノシートトランジスタへ
- フィジカルAI搭載ロボットがモノポリーを実演、1台のPCにモーション制御も統合
- フィジカルAIに挑む日の丸連合、「Noetra」とは何か
- 数μmの傷を手で触って判別できる触覚増幅デバイス、デジタル化も視野に
- タムロンと大阪大学が薄型軽量で耐熱性に優れたMIM構造の近赤外光源を実用化
- SBOMで脆弱性管理を高度化する新システムを提供
- 陸上自衛隊から四足歩行型警備ロボットシステムの導入検証業務を受託
- 村田製作所が製品データ自動取得サービスの対象範囲を24倍に大幅拡大
コーナーリンク
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。