装着型運動アシストロボットのAI駆動型制御手法を開発:医療技術ニュース
理化学研究所は、装着者の身体運動情報と一人称視点の映像から、装着型運動アシストロボットの制御コマンドを生成するAI駆動型制御手法を開発し、ヒトの運動負荷を適切に軽減できることを実証した。
理化学研究所は2025年6月11日、装着者の身体運動情報とウェアラブルカメラの一人称視点映像から、装着型運動アシストロボットの制御コマンドを生成するAI(人工知能)駆動型制御手法を開発したと発表した。
 AI駆動型制御による装着型アシストロボット 出所:理化学研究所
AI駆動型制御による装着型アシストロボット 出所:理化学研究所装着型運動アシストロボットを日常生活で使用する場合、装着者の意図を読み取って周囲の環境に対応し、さまざまな動作を柔軟に実行する必要がある。従来の生体信号情報として筋電図を活用する手法は、装着者の意図を高精度に推定できるが、一方で生体信号情報を取得するためのセンサーの取り扱いに高い専門性が必要となる。
今回の研究では、センサーを使用せずに装着者の動作意図を推測し、環境に適応して動作できる装着型運動アシストロボット技術の開発を目指した。
研究チームは、装着型運動アシストロボットが装着者の意図を推測する情報源として、装着者の周囲環境を捉えた一人称視点の映像と装着者の関節角度や角速度、胴体部の回転運動情報を入力した。これらの情報を基に、AIモデル「Transformer」をベースとした深層学習モデルから、アシストロボットの制御コマンドを出力するアシスト動作生成手法を開発。独自開発中の装着型運動アシストロボットを用いて2段階の実験で検証した。
第一段階では、データ取得と提案手法モデルの学習をした。まず、アシスト動作を制御しない状態で、装着者に歩行や床にあるものを拾う、段差を上るといった複合動作をしてもらい、その際の一人称視点映像、関節角度、角速度などの身体情報を計測した。また、動作中にアシストが必要、あるいは不要と感じた区間について、装着者がボタン操作することでラベル付けした。そして、これらのデータセットを用いて、提案手法モデルを学習させた。
第二段階では、第一段階で学習したモデルによる提案手法を装着型運動アシストロボットに搭載し、リアルタイム制御による動作支援実験として、第一段階と同様の歩行や段差上りなどの複合動作をすることで手法の有効性を検証した。動作支援に関しては、装着者の筋活動と心拍の計測結果で評価し、ロボットの精度は従来手法と比較して検証した。

その結果、提案手法による装着型運動アシストロボットで支援した場合は、支援がない場合と比べて装着者の筋活動量が軽減することが示された。このロボットシステムを別の装着者に適用したところ、同様に筋活動量が軽減したことから、制御モデルが他者に対しても高精度な適用力を持つ可能性が示された。
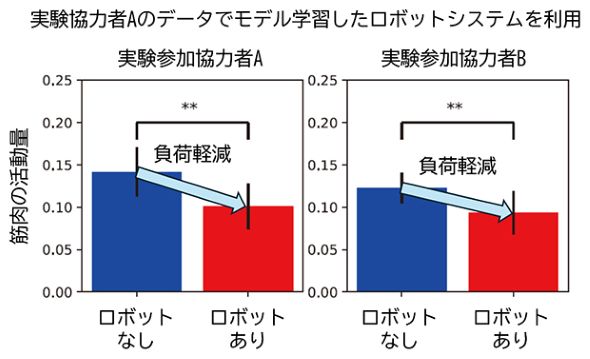 動作支援による身体への影響 出所:理化学研究所
動作支援による身体への影響 出所:理化学研究所今回開発した手法により、装着型運動アシストロボットの自律的な制御技術が向上し、同ロボットを日常生活で容易に活用できるようになることが期待される。
関連記事
 13軸制御の極細線用コイリングマシン販売開始、医療用ガイドワイヤも成形
13軸制御の極細線用コイリングマシン販売開始、医療用ガイドワイヤも成形
アマダプレスシステムは、13軸制御を備え、極小コイルを高速かつ高精度に加工する極細線用2ポイントコイリングマシン「WH-2A」を販売開始した。押しばねの成形に対応し、テーパー形状などの特殊な押しばねも加工できる。 吸入麻酔薬の作用メカニズムの一端を解明
吸入麻酔薬の作用メカニズムの一端を解明
東京大学は、カルシウム放出チャネルの1型リアノジン受容体が、吸入麻酔薬の標的分子として全身麻酔の導入に関与していることを明らかにした。吸入麻酔薬が生体内でどのように作用し、全身麻酔を誘導するかを解明する重要な知見として期待される。 光学的血流計測を用いて出血性ショックの微小循環不全を可視化する技術を実証
光学的血流計測を用いて出血性ショックの微小循環不全を可視化する技術を実証
明治大学は、出血性ショックの犬モデルを用いて、拡散相関分光法による微小循環不全のモニタリング技術を実証した。微小循環不全を早期検出することで、救命率の向上が期待される。 指に装着するだけ、非侵襲かつ連続的に血圧測定できるカフを発売
指に装着するだけ、非侵襲かつ連続的に血圧測定できるカフを発売
日本ベクトン・ディッキンソンは、指にカフを装着するだけで、非侵襲かつ連続的に血圧を測定できる「VitaWaveフィンガーカフ」を発売した。血管にカテーテルを挿入せずに、血行動態パラメーターをリアルタイムで測定、モニタリングできる。 約23.7万個の電極で細胞活動を高精度に可視化するMEAシステムを開発
約23.7万個の電極で細胞活動を高精度に可視化するMEAシステムを開発
ソニーセミコンダクタソリューションズは、約23.7万個の電極を配置したCMOS-MEAを活用し、細胞活動を高精細に可視化するMEAシステムを開発した。高密度での細胞活動データの計測、記録に対応する。 薬剤を2000倍に濃縮して内包できる無機ナノ粒子カプセル作製法を確立
薬剤を2000倍に濃縮して内包できる無機ナノ粒子カプセル作製法を確立
北海道大学らは、無機ナノ粒子を構成要素としたナノサイズの中空カプセル構造体作製技術を開発した。薬剤を2000倍以上に濃縮して効率的に内包できるため、次世代の薬物送達キャリアとして期待される。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
医療機器の記事ランキング
- 1分間隔で日常生活下の血圧を測定できるプログラムを発売
- 医療文書の作成時間を30分から5分へ、生成AIで現場の業務効率化
- アトピーのかゆみや症状に差が出る理由、T細胞受容体の違いにあり
- NTTが養殖飼料向け珪藻を育種、DHAなど5種の脂肪酸が1.8倍に
- 血液中のがんマーカーを基準値の1000分の1濃度で計測、数分での検査が可能に
- 肌のキメには“凸凹”が必要だった! ヒトの皮膚再現モデルを富士通が開発
- 気温45℃でも15℃を維持、冷却性能が1.6倍になった水冷ウェアを開発
- 0.02mmの極薄フィルムを採用した放射線治療用シールを発売
- 花王が新たな保湿技術を構築、周囲の水分を引き寄せてうるおい続く
- 「記憶があるのに思い出せない」はなぜ? 脳の神経活動のゆらぎが関係か
コーナーリンク




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。