自律移動ロボットの効率的な移動や柔軟な動きを可能に、ソニーグループが技術発表:ロボット開発ニュース
ソニーグループとソニー・インタラクティブエンタテインメントが共同で発表したロボットの移動機構に関する5本の論文が、AI、ロボティクス分野の国際学会において採択された。
ソニーグループは2024年10月9日、ソニー・インタラクティブエンタテインメントと共同で発表したロボットの移動機構に関する5本の論文が、AI(人工知能)、ロボティクス分野の国際学会「IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)2024」において採択されたと発表した。
これらの論文は、ロボットの効率的な移動やさまざまな環境に適応した柔軟な動きを可能にする技術に関するもので、自立移動ロボットの進化に貢献する研究成果だ。
論文「受動変形構造を持つ全方位球面車輪の開発」では、段差に当たると自動で形状を変え安定して乗り越えられるモーター内蔵型の全方位車輪の開発は、ロボットに限らず、車いすや台車など車輪を搭載する移動体の進化に貢献する可能性があることを示唆した。
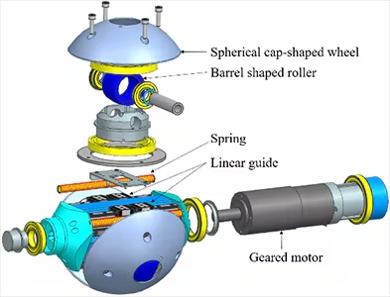 受動変形構造を持つ全方位球面車輪 出所:ソニーグループ
受動変形構造を持つ全方位球面車輪 出所:ソニーグループ論文「跳躍行列とゼロ次確率非線形モデル予測制御を用いたモデルベース歩行制御のロバスト性向上」では、跳躍行列を用いてロボットと外部環境の接触における不確実さを事前に予測しリアルタイムで動作を最適化する手法の開発は、段差や地面の凹凸を正確には計測できない場合でも、衝突や転倒を避けて自律移動を可能にすることを論じた
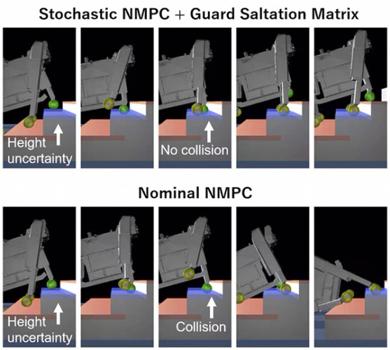 地形の高さに不確実性のある状況で段差を登るシミュレーション 出所:ソニーグループ
地形の高さに不確実性のある状況で段差を登るシミュレーション 出所:ソニーグループ論文「直動6脚車輪ロボット<Tachyon3>における解析的平滑化による制御バリア関数を用いた実時間認識統合運動制御」では、衝突検出技術と制御バリア関数を融合した運動制御技術の開発は、ロボットが周辺環境との衝突や転倒を招かない安全な領域に脚を配置する動作を、1ミリ秒以内で生成することを可能にしたことを示唆した。

さらに、周辺の床と物体の点群データのセンシングで複数のLiDARをキャリブレーションする手法、ねじりコイルばねを用いた小型直列弾性アクチュエーターの開発に関する論文が採択されている。
関連記事
 広がる遠隔操作ロボットの世界、川崎重工とソニー、オカムラ、ホンダなどが本格化
広がる遠隔操作ロボットの世界、川崎重工とソニー、オカムラ、ホンダなどが本格化
慢性的な人手不足や、コロナ禍による人依存度の低減などから、製造現場でより幅広いロボットの活用が進んでいる。その中で、ロボットによる作業の内、完全自動化が難しい部分だけを人の遠隔操作で補う「遠隔操作ロボット」への取り組みが本格化しつつある。 目指すは「義足界のテスラ」、元ソニー技術者が挑戦するロボット義足開発
目指すは「義足界のテスラ」、元ソニー技術者が挑戦するロボット義足開発
モノづくり施設「DMM.make AKIBA」を活用したモノづくりスタートアップの開発秘話をお送りする本連載。第8回は、ロボティクス技術で義足をより使いやすいものに変革しようと研究開発を行うBionicMを紹介する。自身も義足を使用する同社CEOの孫小軍氏は、階段の昇降も容易く、かつ、服で隠す必要のない“カッコいい”デザインの義足を開発したいと意気込む。 ソニー「aibo」復活の意義を考察する
ソニー「aibo」復活の意義を考察する
新型の家庭向けロボット「aibo」を発表したソニー。同社社長兼CEOの平井一夫氏は「ユーザーに感動をもたらし、人々の好奇心を刺激する会社で有り続けることが、ソニーのミッションであり、ソニーの存在意義だ」と高らかに宣言したが、筆者の大塚実氏はやや複雑な思いでこの発表会を見ていた。 ロボットの遠隔操作を身近に、川崎重工とソニーが作ったリモートロボティクス
ロボットの遠隔操作を身近に、川崎重工とソニーが作ったリモートロボティクス
川崎重工とソニーグループが設立した遠隔操作ロボットサービスのリモートロボティクスは、「2022国際ロボット展(iREX2022)」(東京ビッグサイト、2022年3月9〜12日)の川崎重工ブース内に出展し、同社の持つ技術力や遠隔ロボットサービスの内容を紹介した。 ソニーが6脚車輪ロボットを開発、車輪移動と脚移動で整地と不整地に両対応
ソニーが6脚車輪ロボットを開発、車輪移動と脚移動で整地と不整地に両対応
ソニーグループが不整地を安定かつ高効率に移動できるロボットを新たに開発。接地部分に車輪アクチュエーターを搭載した6本の脚構造を持つ「6脚車輪構成」のロボットで、平地では車輪移動を行い、階段などの段差の昇降では脚移動と車輪移動を併用する。整地と不整地が混在する環境でも、安定かつ高効率な移動を実現できるという。 未知のモノでも優しくつかむ、ソニーがロボットマニピュレーション技術を紹介
未知のモノでも優しくつかむ、ソニーがロボットマニピュレーション技術を紹介
ソニーグループは2021年12月7日、同社が開発中の技術を紹介する「Sony Technology Day」をオンラインで開催。その中で、ロボットが未知のモノでも優しくつかむことができるようになるマニピュレーター技術を紹介した。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。