
連載「CAEを正しく使い疲労強度計算と有機的につなげる」の内容と有限要素法:CAEを正しく使い疲労強度計算と有機的につなげる(2)(2/3 ページ)
1.要素剛性マトリクスの簡単な説明
1本のばねで要素剛性マトリクスを説明します。図2のようなばねがあって、両端の変位をu1、u2とし、両端に作用する力をf1、f2とします。変位も荷重も右向きをプラスとします。

u1<u2の場合を考えましょう。ばねはu2−u1だけ伸びているので、ばねが縮もうとする力はk(u2−u1)となります。荷重の右向きをプラスとしたので、荷重は次式となります。
上式をマトリクス表示しましょう。次式となります。
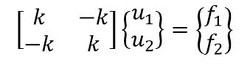 式3
式3上式では[k]を「要素剛性マトリクス」、{u}を「変位ベクトル」、{f}を「荷重ベクトル」と呼んで次式で定義しました。
 式4
式4では、連立方程式である式1、式2を解いてみましょう。行列式を使うとu1、u2は次式となるはずです。
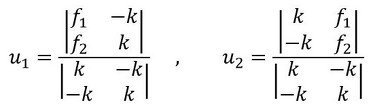 式5
式5|A|は行列式でした。次式で計算します。
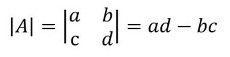 式6
式6では、式5の分母を計算しましょう。
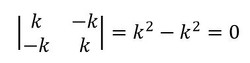 式7
式7分母がゼロとなってしまいu1、u2を求めることはできません。図2をよく見てみると、ばねの一端を固定していませんね。これではばねはx方向に自由に動いてしまいます。このような状態を「剛体変位」といいます。CAEソフトでは固定が十分でない場合に相当します。「ピボットがゼロになりました」というようなメッセージとともに異常終了するか、とても大きな変位を結果として出力します。
u1=0として、ばねの一端を固定しましょう。式1、式2は直ちに解くことができて、他端の変位は次式となります。
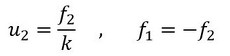 式8
式8マトリクス表示した場合はどうでしょうか。やってみましょう。式3にu1=0を代入します。
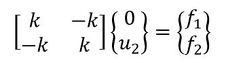 式9
式9式9について、変位が未知なものと既知なものを分けましょう。分割線を青線で描きます。
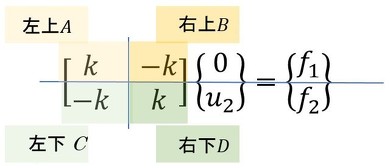 式10
式10行列式の下半分を取り出します。
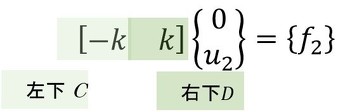 式11
式11上式の左下Cのところはゼロとの掛け算なので、行列の下半分は次式に書き換えられます。
右下Dのところは、今回たまたま1行1列の行列でした。変位ベクトルと荷重ベクトルもたまたま1行でした。上式をマトリクス表示しましょう。
行列[k]の逆行列を式13の左側から掛け算しましょう。
 式15
式15外力f2が作用したときの変位u2が求まりました。
次に、式10の上半分を計算します。左上Aはゼロとの掛け算なので不要です。マトリクス表示で書きます。
固定点の反力が求まりました。以上の説明は、1行1列の行列を使ったので分かりにくかったかもしれませんが、ポイントは式10の行列を4つに分解するところです。
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 使用中に発火、サーキュレーター10万台をリコール
- 図面AIに「動かせる3Dモデル」の生成機能、関節や可動域を自動認識
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- 幾何公差の基準「データム」を理解しよう
- Autodesk Fusionで設計した超小型衛星「PRELUDE」が軌道投入、初期運用へ







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。