「ステアバイワイヤ」を実装、レゴマインドストームで学ぶモデルベース開発:「MATLAB/Simulink」を学生が体験(2/2 ページ)
日産のステアバイワイヤをレゴマインドストームで再現
午後、本題となるNXTモーターを使っての制御器開発に入った。これは、ステアリングの動きを電気信号で前輪の車軸に伝達する「ステアバイワイヤ(Steer by Wire)」機構制御設計をイメージしたもので、NXTモーターと「レゴ マインドストーム NXT(以下、マインドストーム)」を使って実装していく。

 目指すゴールはこちら。2つのNXTモーターを接続したマインドストームに制御設計プログラムを実装し、片方のモーターを手で回すと、もう一方のNXTモーターがその動きを追従するように設計を行う(クリックで拡大)
目指すゴールはこちら。2つのNXTモーターを接続したマインドストームに制御設計プログラムを実装し、片方のモーターを手で回すと、もう一方のNXTモーターがその動きを追従するように設計を行う(クリックで拡大)PID制御ってなんだ?
コントローラー制御としてはPID制御の手法がレクチャーされた。PID制御のPIDは、偏差に対する「Proportional(比例)」「Integral(積分)」「Derivative(微分)」の各動作を意味している。学生たちはこの制御について講習を受けた後、2人1組でコントローラーの出力式の値を変えていき、実機に反映させながら実験と学習を進めていく。


 実験中のようす。中には回転でなくなぜかタイヤがガタガタとふるえ出すことも……。失敗も成功もメモにおさめ、各値を動かすとどう反映されるのか学んでいく
実験中のようす。中には回転でなくなぜかタイヤがガタガタとふるえ出すことも……。失敗も成功もメモにおさめ、各値を動かすとどう反映されるのか学んでいく「企業ではシミュレーション前に実機を使って学ぶ機会がほとんどない。せっかくなので試行錯誤しながらPID制御を学んでほしい」と講師の竹下氏は説明。PID制御を学んだ後は、Simulinkのシミュレーションツールの使い方を学び、実機への実装作業を進めていった。
シミュレーションの特性を知り上手に使う
ワークショップの最後は、各パラメーターの数値をチーム別に発表した。その際、シミュレーション無しで行った実験と、シミュレーション有りで行った実験(MILS:Model In The Loop Simulation)の数値を比較。MILSで行う実験の方が、細かい値のチューニングに適していることが理解できた。
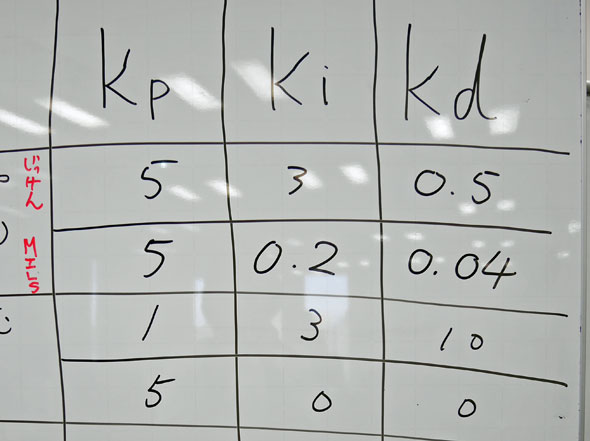 各グループの数値発表の一例
各グループの数値発表の一例最後に竹下氏は「Simulinkはあくまで数値演算を元にシミュレーションを行うもの。プラントモデルを正しく行わないと、予想外の結果がでることもある。自分の経験や知識ともしっかりすり合わせを行いつつ、特性を理解して上手に使ってもらえれば」と解説。参加した学生たちは「シミュレーションと実機の違いを肌で感じる事ができ良かった」「制御は大学の実験でしか触れたことがなかったが、今回のワークショップを通じて多くの知識を得られた」と、実際に触れながら学んだことで知識が血肉となったことと口々に感想を述べていた。
 ワークショップ講師陣の皆さん。右から竹下氏、井上氏、宮崎氏と今回サポートにはいったMathWorksでインターン中の渡邉郁弥氏、田所祐一氏
ワークショップ講師陣の皆さん。右から竹下氏、井上氏、宮崎氏と今回サポートにはいったMathWorksでインターン中の渡邉郁弥氏、田所祐一氏マスワークス人事部人事ジェネラリストの西脇陽子氏は、「MATLAB/Simulinkの知名度はあるが、マスワークスが提供していることはあまり学生に知られていない。これからも教育支援を行うと共に、マスワークス=MATLAB/Simulinkということも広めていければ」とコメントし、次回開催も予定しているとした。
関連記事
- ロボットにもモデルベースデザインのチカラを、新ツールで劇的に進化したMATLAB/Simulinkによるロボット開発
昨今注目されるロボット。モデルベースデザイン環境「MATLAB/Simulink」を提供するMathWorksが発表した、ロボット開発にモデルベースデザインの手法を導入するためのツール「Robotics System Toolbox」について解説する。  「トレンドは追わない。長期的な変革に寄り添っていく」――MathWorksが「R2014b」の新機能を説明
「トレンドは追わない。長期的な変革に寄り添っていく」――MathWorksが「R2014b」の新機能を説明
The MathWorksはユーザーカンファレンス「MATLAB EXPO 2014 JAPAN」の開催にあわせ、MATLAB/Simulinkの最新バージョン「リリース2014b」の新機能に関する説明会を開催した。 未来のエンジニアを育成! MathWorksの学生向けワークショップに潜入
未来のエンジニアを育成! MathWorksの学生向けワークショップに潜入
The MathWorksの日本法人であるMathWorks Japanは、理工系の学生を対象とした未来のエンジニアの育成を目的とするワークショップ「MATLABエンジニアの仕事体験デー」を開催。学生たちが同社のモデルベース設計ツール「MATLAB/Simulink」を使用して、制御プログラムの設計・開発を行う様子を取材した。 日産が提示するステアバイワイヤ技術の可能性
日産が提示するステアバイワイヤ技術の可能性
日産自動車は、ステアリングホイールによる操舵とタイヤの切れ角の変更を独立に制御できるステアバイワイヤ技術を開発した。自動車を、機械式ステアリングの制約から解放するこの技術にはどのような可能性が詰まっているのだろうか。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- アマノの複数階清掃に対応した業務用ロボット掃除機に自律移動ソフトが採用
- 組み込みソフトのAI駆動開発を可能に、高セキュリティと低コストを両立
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。