これはまさに夢の企画――巨大ロボが殴り合う「リアルロボットバトル」に密着してきた:『ロボット日本一決定戦!リアルロボットバトル』の舞台裏(2/4 ページ)
1回戦第1試合
1回戦の第1試合は、「HJM-47」(はじめ研究所チーム)と「柊」(THKロボットサークルチーム)の対戦。はじめ研究所チームを率いる坂本元氏と、THKロボットサークルチームを率いる永塚正樹氏は、ともに2足歩行ロボットのバトル大会「ROBO-ONE」の経験者である。そのせいか、この試合はまるでROBO-ONEを見ているかのような、スピード感のある激しいバトルとなった。
ガンダムカラーの「HJM-47」は、高速移動と強力なパンチが持ち味。電動バイクで使われるハブモーターの車輪を両足に内蔵しており、最高時速はなんと40km程度だという。両輪を逆回転させることで、その場での高速旋回も可能だが、その半面、メカナムホイールやオムニホイールのような横方向への移動はできない。
 はじめ研究所チームの「HJM-47」
はじめ研究所チームの「HJM-47」はじめ研究所チームは、現在進行中の「4mロボットプロジェクト」で、大型ロボットの製作経験があるのが強みだろう(関連記事:「いつかガンダムを作るんだ!」――西淀川の町工場でオヤジたちの思いが1つに)。「HJM-47」にも強力なサーボモーターが搭載されており、鉄製ナックルを使った腰の入ったパンチは破壊力が大きい。
対するTHKロボットサークルチームの「柊」は武者風のロボット。サーボモーターはあまり強力ではないものの、上半身への攻撃を受け流す免震機構を腰に内蔵していたり、乱打攻撃をしかける4本の触手型アームを背面に搭載していたり、発想が非常にユニークだ。首の部分にはマイクロソフトのモーションセンサーデバイス「Kinect」が内蔵されており、画像認識によるコアの自動追尾攻撃も実装する予定だったが、この機能は開発が間に合わなかったそうだ。
 THKロボットサークルチームの「柊」
THKロボットサークルチームの「柊」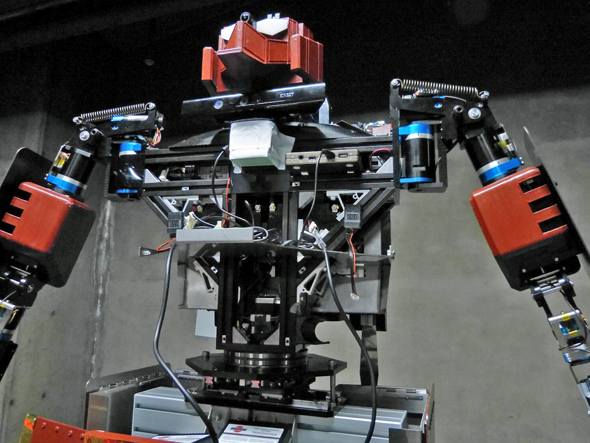 「柊」の内部構造。腰の部分にTHKの免震機構が搭載されている
「柊」の内部構造。腰の部分にTHKの免震機構が搭載されている試合は、常に「HJM-47」が先行する展開。終盤、「柊」が接近戦に持ち込み、乱戦となったが、「HJM-47」が辛くも1ポイント差(7−6)で逃げ切った。
1回戦第2試合
1回戦の第2試合は、「狐火」(東京工業大学・ロボット技術研究会チーム)と「マルミエーターUNCHI48(センター)」(『世界まる見え!テレビ特捜部』チーム)という、毛色の全く違うロボットが激突した。
「狐火」は今回唯一の4足ロボット。2足でなく4足にしたのは、安定性が高く、高速移動に向いているからだという。ロボットの操縦はマスタースレーブ方式。Kinectによるモーションキャプチャーで操縦者の動きを検出して、ロボットを動かしている。さらに、ロボット自体にもカメラを搭載しており、画像認識により、コアを自動追尾して攻撃することが可能だ。非常に理にかなった実戦的なロボットである。
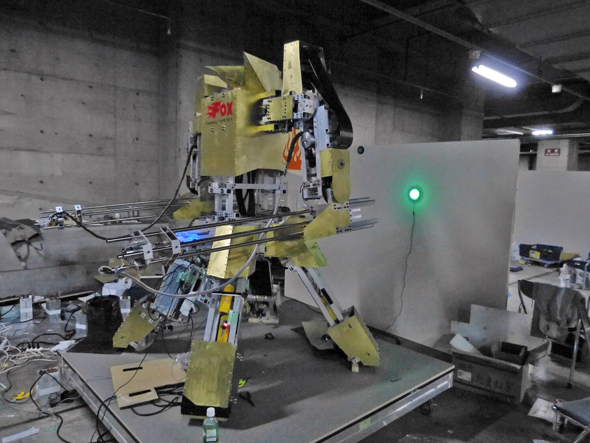 東京工業大学・ロボット技術研究会チームの「狐火」
東京工業大学・ロボット技術研究会チームの「狐火」一方、「マルミエーターUNCHI48(センター)」は、人気番組『世界まる見え!テレビ特捜部』からのアイデアを実現したロボット。「鋼鉄製のピコピコハンマー」「おっぱいミサイル」「うんこカー」などのムチャなネタを、ピルクス、浜野製作所などといった各分野のプロフェッショナルが協力してロボットに実装した。
この巨大ロボットのために、ピルクスはトルクが2tもあるサーボモーターを自作。また制御には、あの「V-Sido」の吉崎航氏が協力。吉崎氏は水道橋重工の巨大ロボット「クラタス」にも関わっており、巨大ロボットの制御については既に実績がある(関連記事:搭乗型巨大ロボット「KURATAS」を安全に動かすソフトウェアのヒミツ)。見た目と違い、中身は相当本気のロボットだ。
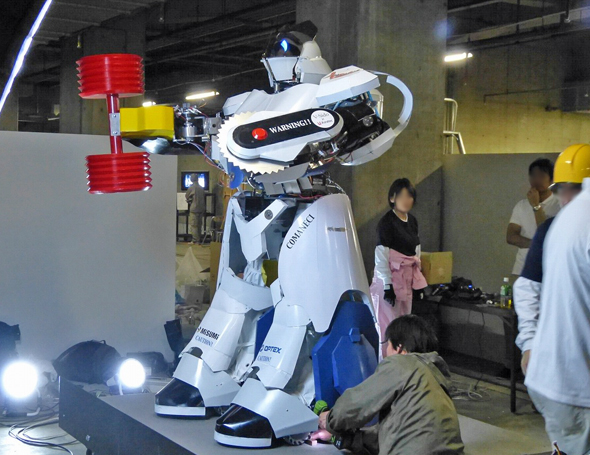 人気番組『世界まる見え!テレビ特捜部』チームの「マルミエーターUNCHI48(センター)」
人気番組『世界まる見え!テレビ特捜部』チームの「マルミエーターUNCHI48(センター)」試合は、「狐火」が高速な移動と正確な攻撃で圧倒。「マルミエーターUNCHI48(センター)」は開始直後から防戦一方であったが、背中を向けてしまったところを攻撃され、ロボットを制御するノートPCが落下。動けなくなってしまい、TKO負けとなった。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。