「熟した果実を狙い撃ち」――イチゴの収穫をロボットで自動化、農研機構:定置型により低コスト化を実現
農業・食品産業技術総合研究機構(農研機構)は、定置型イチゴ収穫ロボットを開発。収穫作業の省力化に加えて、定植から栽培管理、防除、収穫作業までがシステム化され、イチゴの大規模生産技術の構築に貢献するという。

「食料」「農業」「農村」に関する研究開発を行う、農業・食品産業技術総合研究機構(農研機構)は2013年6月4日、「定置型イチゴ収穫ロボット」を開発したことを発表した。収穫作業の省力化に加えて、定植(植え付け)から栽培管理、病害虫防除、収穫作業までがシステム化され、イチゴの大規模生産技術の構築に貢献するという。
日本国内におけるイチゴの年間産出額は約1500億円といわれる。促成栽培において、「とちおとめ」「あまおう」「紅ほっぺ」「女蜂(にょほう)」「章姫(あきひめ)」などの一季成り品種は、9月に定植すると、12月から翌年5月ごろまでの期間収穫することができる。農研機構によると、イチゴ栽培に必要な労働力は、およそ2000時間/10a(アール:10a=1000m2)で、そのうちの23%が収穫作業によるものだという。こうした収穫作業における多大な労力が、イチゴ栽培の規模拡大の足かせになっており、自動化が強く求められている。

これまで農研機構は、“移動型”のイチゴ収穫ロボットの開発や、慣行栽培の2倍程度の密植が可能で、定植から栽培管理・収穫までを定位置で行える「循環式移動栽培装置」などを開発してきた。しかし、移動型のイチゴ収穫ロボットにおいては、対象果実のうち、およそ50〜60%を夜間に収穫できることを実証できたものの、ロボットのコストダウンに課題を残していたという。
そこで、既存のイチゴ収穫ロボットの技術と循環式移動栽培装置を連動させて機構をシンプルにし、コストダウンを図った、定位置で自動収穫を行う定置型ロボットシステムを開発(2011年度)。これに、果実周辺の遮光と昼間動作プログラムを組み込むことで改良を図り、従来の移動型では困難だった昼間の収穫(稼働時間の拡大)も可能にした(2012年度)。
本システムは、横移動中の栽培ベッドから赤色果実を画像処理により探索し、栽培ベッドを停止させて、収穫適期の果実のみを自動でつみ取ることができる。1〜3月期に実施した性能試験の結果では、赤く熟した果実のうち40〜70%の果実を収穫でき、作業の省力化とロボットの稼働時間の拡大を実現できたという(時間当たりの処理面積は20〜40m2)。
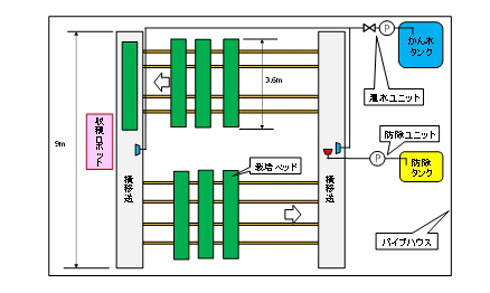 定置型イチゴ収穫ロボットと循環式移動栽培装置の配置
定置型イチゴ収穫ロボットと循環式移動栽培装置の配置ロボット本体は、循環式移動栽培装置の横移送ユニットの中央に配置。循環式移動栽培装置は長さ3.6mの栽培ベッドを16台搭載する。ロボットは、マニピュレータ(人間の手や腕に当たる機械)、マシンビジョン(目視検査に当たる画像処理など)、エンドエフェクタ(人間の指先に当たる機械)、トレイ収容部から構成される。マシンビジョンをエンドエフェクタから独立させたことで、採果後すぐに果実探索が行えるという。栽培ベッドの横移送中に赤色果実の有無を走査し、検出すると、栽培ベッドを一時停止させてエンドエフェクタに搭載されているカメラで着色度判定と果実の重なり判定を実施。収穫条件を満たせば、果柄を切断して採果を行う。万が一、果実が未熟であったり重なりがあったりした場合は、栽培ベッドを移送させ、撮影角度を変えて再度判定を行う。
果実の大きさや形状、着果状態は、収穫時期により大きく変化するため、マシンビジョンプログラムには2つのモードが搭載されている。1つは、果実の重なり判定を厳しくすることで、未熟果の誤収穫を低減する「慎重モード」。もう1つは、少しでも多くの果実を収穫したいときに最適な「積極モード」である。
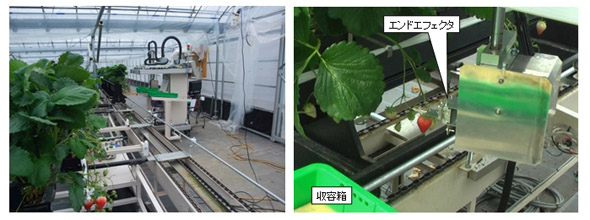 (左)定置型イチゴ収穫ロボットと循環式移動栽培装置の連動/(右)エンドエフェクタによる採果
(左)定置型イチゴ収穫ロボットと循環式移動栽培装置の連動/(右)エンドエフェクタによる採果農研機構は、今後、定置型イチゴ収穫ロボットによる連続収穫試験を行って、データの蓄積を図るとともに、さらなる動作の安定性・耐久性を追求するという。特に、昼間動作の安定性の向上に注力し、2014年度の実用化に結び付けたい考えだ。
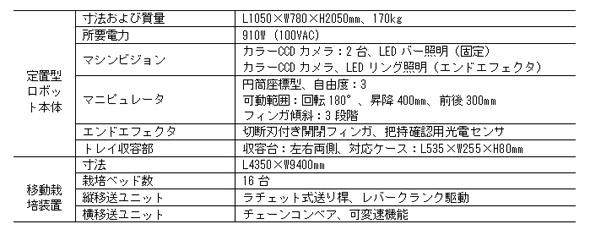 定置型イチゴ収穫ロボットと循環式移動栽培装置の仕様
定置型イチゴ収穫ロボットと循環式移動栽培装置の仕様ロボット開発の最前線

関連記事
 M2Mとクラウドのコンビネーションで実現する――地球に優しい“攻めの農業”
M2Mとクラウドのコンビネーションで実現する――地球に優しい“攻めの農業”
明治大学、ルートレック・ネットワークス、セカンドファクトリー、日本マイクロソフトは、明治大学黒川農場が研究を進める「養液土耕栽培」をICTで実現する、養液土耕システム「ZeRo.agri」に関する報告会を開催。温室内に設置された各種センサーからの情報をクラウド(Windows Azure)上に集め、それを分析・解析し、その結果を基に、培養液(水と肥料を混合したもの)を必要なタイミングで、必要な量だけを自動供給するシステムを報道陣に披露した。 「こたつに入ったまま“雪かき”できる」――会津生まれの遠隔操作除雪ロボット
「こたつに入ったまま“雪かき”できる」――会津生まれの遠隔操作除雪ロボット
積雪の多い東北地方では、毎冬の除雪作業に大変な労力を要する。高齢者や女性にとっては重労働だ。東北初をうたうロボット企業アイザックは、モバイル端末(タブレット型PC)を用い、家の中にいながら遠隔操作で除雪作業が行える「遠隔操作除雪ロボット」の試作1号機を開発した。 そのソーラーパネル、誰が掃除する? 水なしキレイな清掃ロボット
そのソーラーパネル、誰が掃除する? 水なしキレイな清掃ロボット
香川大学発のベンチャー企業である未来機械は、ソーラーパネルの上を自動走行しながら、水を使わずに清掃できる「ソーラーパネル清掃ロボット」の試作機を開発。実証実験において、手作業での清掃と同等以上の発電能力の回復効果が見込めることを確認できたという。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。