
ヒューマノイドとAMRが連携、山善が“未来の倉庫”デモ:2025国際ロボット展
山善は2025国際ロボット展で、ヒューマノイドロボットとAMRの連携デモを公開した。共通基盤により異機種連携を実現。2026年にはデータ生成センターを稼働させ、現場実装を加速する。
山善は「2025国際ロボット展(iREX2025)」(2025年12月3〜6日、東京ビッグサイト)において、INSOL-HIGHと推進しているヒューマノイドロボット導入プロジェクトの最新成果を公開した。ブースでは、ヒューマノイドロボットがピッキングを行い、自律搬送ロボット(AMR)と連携して搬送までを行うデモンストレーションを披露した。
ヒューマノイド特化のプラットフォームが指令塔に
デモンストレーションは、物流倉庫のピッキングステーションを模した環境で行った。ヒューマノイドロボットがカゴの中にあるぬいぐるみとボールを、背後で待機しているAMR上のコンテナへ移し替える。コンテナへのピッキングが完了すると、AMRは自動的に走り出し、コンテナを回収し、出荷場へと搬送する。
山善とINSOL-HIGHは2025年4月に業務提携し、ヒューマノイドロボットの実用化に向けた検証を進めてきた。同年10月には、東京納品代行の物流センター(千葉県市川市)において実証実験を行い、ヒューマノイドロボット単体でのピッキング性能(成功率97%、平均タクトタイム131.0秒)を確認している。

2025国際ロボット展でアップデートした点は、異なるメーカーのロボット同士がシームレスに連携していることだ。使用した機体は、山善が日本企業として初めて導入した中国AGI BOT製のヒューマノイドロボットと、中国Youibot Robotics(ユーアイボットロボティクス)製のAMRである。ロボットの統合制御は、INSOL-HIGHが開発したヒューマノイド特化型プラットフォーム「REAaL」上でAPI連携を行うことで実現した。プラットフォームが指令塔となることで、異なるメーカーのロボットであってもスムーズな協調動作を可能にしている。

ヒューマノイドロボットは、頭部と左右の指先の3カ所に搭載されたカメラによって、対象物を認識、ピッキングしている。REAaL上でもリアルタイムの稼働状況を取得しており、「ケースが空になる」「5個の製品をピッキングする」といったタスク条件を組み込むことで、条件達成を確認し次第、AMRへ搬送指示を送る仕組みだ。
フィジカルデータ生成センターは2026年春稼働
この高度な自律動作を実現する鍵となるのが「学習データ」だ。INSOL-HIGHは、人間がロボットを操作して行う「模倣学習」のデータと、シミュレーター上での学習データを組み合わせることで、ロボットの脳(基盤モデル)を構築している。今回の展示に向けた準備でも、東京納品代行での実証実験時に作成した基礎モデルをベースに、展示会場の環境に合わせた追加学習(ファインチューニング)を行うことで、短期間でのセットアップを実現したという。
 山善の北野峰陽氏。ロボットの学習はVRゴーグルやコントローラによって行う
山善の北野峰陽氏。ロボットの学習はVRゴーグルやコントローラによって行う山善は、ヒューマノイドロボットの社会実装における最大の課題は「フィジカル学習データの不足」にあると分析している。
「米国NVIDIAなどの海外テック大手はシミュレーター上での学習に強みを持つが、山善は現実世界(フィジカル)での良質なデータ収集に活路を見いだしている」(山善 ヒューマノイドロボット市場開発担当課長の北野峰陽氏)
そのデータ収集の場として設立を進めているのが、「フィジカルデータ生成センター」だ。これは最大50台のヒューマノイドロボットと50人のオペレーターが同時稼働できる大規模なトレーニング施設で、2026年春頃の稼働を目指している。
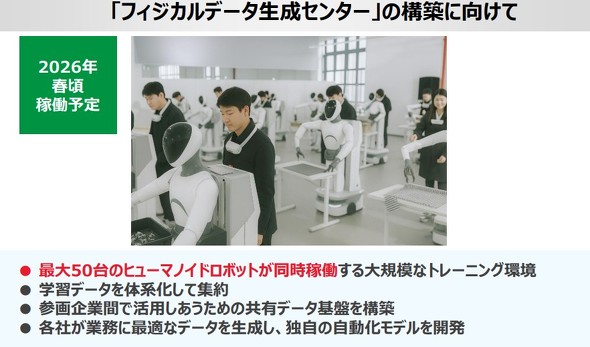 2026年春の稼働を予定しているフィジカルデータ生成センター[クリックで拡大] 出所:山善
2026年春の稼働を予定しているフィジカルデータ生成センター[クリックで拡大] 出所:山善同センターでは、実際の作業現場に近い環境でオペレーターがロボットを遠隔操作し、その動きをデータとして蓄積する。集められた膨大な「フィジカルデータ」は、ロボットが自律的に動くための教師データとして活用される。INSOL-HIGHを事務局とし、山善を含む10社程度のコンソーシアム形式で行う。なお、サーバ内に蓄積する情報やトレーニング内容は、個社ごとが秘匿に管理できる仕組みとする。
北野氏は今後の展開について、「2026年度内には、工場や倉庫などの実現場への本格導入を目指す」と語る。ロボット本体はレンタルやリース、学習データやプラットフォーム利用料はサブスクリプション(従量課金)で提供するビジネスモデルを想定しており、初期費用を抑えることで導入のハードルを下げる考えだ。
関連記事
 ヒューマノイドロボットがいよいよ現場に? 山善が物流現場での試験導入を公開
ヒューマノイドロボットがいよいよ現場に? 山善が物流現場での試験導入を公開
山善が、物流現場の人手不足解消に向け、ヒューマノイドロボットの本格試験導入を公開。デモでは初見の商品も難なくピックした。今後は「フィジカルデータ生成センター」を核に学習データを量産し、2026年度内の本格導入を目指す。 ヒューマノイドの社会実装阻む3つの壁、「フィジカルデータ生成センター」で打破
ヒューマノイドの社会実装阻む3つの壁、「フィジカルデータ生成センター」で打破
INSOL-HIGHが東京都内でヒューマノイドロボットの未来戦略を議論するミートアップイベント「Humanoid Robot×Japan's Future Meet UP」を開催。ヒューマノイドロボットの社会実装を加速する「フィジカルデータ生成センター」構想などについて説明した。 川崎重工が次世代“オープン”コントローラー構想披露、EtherCATで統合同期制御
川崎重工が次世代“オープン”コントローラー構想披露、EtherCATで統合同期制御
川崎重工業は「2025国際ロボット展(iREX2025)」において、ロボットを含めた複数機器の同期制御のデモを通して、次世代オープンコントローラーのコンセプトを紹介した。 ヒューマノイドがリングで激突!? ユニツリー「G1」がキックボクシングで対決
ヒューマノイドがリングで激突!? ユニツリー「G1」がキックボクシングで対決
TechShareは「2025国際ロボット展」で、Unitree Roboticsのヒューマノイドロボット「G1」のキックボクシング実演を披露した。身長130cmの機体がリングで鋭いパンチやキックを繰り出す。 驚異的な演算/運動性能を兼ね備えた次世代犬型ロボ「PUDU D5」シリーズが誕生
驚異的な演算/運動性能を兼ね備えた次世代犬型ロボ「PUDU D5」シリーズが誕生
Pudu Roboticsは「2025国際ロボット展(iREX2025)」において、次世代の産業用自律型四足歩行型ロボット「PUDU D5」シリーズを披露した。2026年4月頃に日本で販売予定で、価格帯は600万〜700万円を想定している。 サービスロボット市場は2035年に11兆5481億円規模へ、ヒューマノイドは1兆円弱
サービスロボット市場は2035年に11兆5481億円規模へ、ヒューマノイドは1兆円弱
富士経済は、サービスロボット世界市場の調査結果を発表した。高齢化や人手不足、AI、IoT技術の進展を背景に、2025年の同市場規模を前年比13.6%増の2兆7415億円と予測。2035年には11兆5481億円に拡大すると見込む。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Factory Automationの記事ランキング
- 令和8年熊本地震による工場への影響まとめ
- 異例ヒット? 使い勝手にこだわったオムロンの“オープンな”IO-Linkマスター
- マツダが挑む設備保全DX、AIやIoTで自動車工場内火力発電所の現地点検ゼロへ
- いざ「Re:Nissan」実現へ、日産栃木工場が挑んだ「生産体制の比例化」
- 10年タイで暮らした自分が4年ぶりに現地を訪れたら……
- 機械業界の他社けん制力ランキング2025発表
- データだけ見ても人は動かない ヤマ発製造DXの失敗が生んだ現場サイエンティスト
- 自律走行ロボット第2世代 連続稼働時間3.6倍、他社製品との連携も可能
- 判定はエッジAIで完結/既存カメラをAI化、TDKの産業用ソリューション
- 次なる産業革命へ、トップはかく語りき NVIDIA/富士通/ファナック/安川/川重
コーナーリンク




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。