
「Jetson Nano」でにゃんこを判別してLチカで知らせるエッジAIデバイスを作る:Jetson Nanoで組み込みAIを試す(5)(3/4 ページ)
imagenet-cameraを利用してLチカのロジックを実装
ここまで終わったら、いよいよプログラムである。今回はimagenet-cameraを利用して以下のロジックを実装することにした。
- 猫を判別したら黄色のLEDが点灯、さもなくば消灯
- 猫がTabby catだったら緑色のLEDも点灯
さて、そのソースはこちらである(リスト2)
import jetson.inference
import jetson.utils
import argparse
# for LED output
import RPi.GPIO as GPIO
pin_cat = 13
pin_tabby = 6
# parse the command line
parser = argparse.ArgumentParser(description="Classify a live camera stream using an image recognition DNN.",
formatter_class=argparse.RawTextHelpFormatter, epilog=jetson.inference.imageNet.Usage())
parser.add_argument("--network", type=str, default="googlenet", help="pre-trained model to load, see below for options")
parser.add_argument("--camera", type=str, default="0", help="index of the MIPI CSI camera to use (NULL for CSI camera 0),\nor for VL42 cameras the /dev/video node to use (/dev/video0).\nby default, MIPI CSI camera 0 will be used.")
parser.add_argument("--width", type=int, default=1280, help="desired width of camera stream (default is 1280 pixels)")
parser.add_argument("--height", type=int, default=720, help="desired height of camera stream (default is 720 pixels)")
opt, argv = parser.parse_known_args()
# setup GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(pin_cat, GPIO.OUT, initial=GPIO.HIGH)
GPIO.setup(pin_tabby, GPIO.OUT, initial=GPIO.HIGH)
# load the recognition network
net = jetson.inference.imageNet(opt.network, argv)
# create the camera and display
font = jetson.utils.cudaFont()
camera = jetson.utils.gstCamera(opt.width, opt.height, opt.camera)
display = jetson.utils.glDisplay()
# process frames until user exits
while display.IsOpen():
# capture the image
img, width, height = camera.CaptureRGBA()
# classify the image
class_idx, confidence = net.Classify(img, width, height)
# find the object description
class_desc = net.GetClassDesc(class_idx)
# Check cat exist or not
if "cat" in class_desc:
GPIO.output(pin_cat, GPIO.HIGH)
if "tabby" in class_desc:
GPIO.output(pin_tabby, GPIO.HIGH)
else:
GPIO.output(pin_tabby, GPIO.LOW)
else:
GPIO.output(pin_cat, GPIO.LOW)
GPIO.output(pin_tabby, GPIO.LOW)
# overlay the result on the image
font.OverlayText(img, width, height, "{:05.2f}% {:s}".format(confidence * 100, class_desc), 5, 5, font.White, font.Gray40)
# render the image
display.RenderOnce(img, width, height)
# update the title bar
display.SetTitle("{:s} | Network {:.0f} FPS".format(net.GetNetworkName(), 1000.0 / net.GetNetworkTime()))
# print out performance info
net.PrintProfilerTimes()
リスト2において、元のソース(imagenet-camera.py)から変更(というか追加)した部分は、4〜7行目、16〜19行目、34〜43行目になる。
まずは、4〜7行目にあるimport RPi.GPIO as GPIOが、Jetson.gpioパッケージを使うための宣言である(リスト3)。次のpin_catとpin_tabbyの値がちょっと分かりにくいと思う。先にシェルから直接たたいたケースでは、cat(33番ピン)はgpio38、tabby(31番ピン)はgpio200という番号になっていたが、RPi.GPIOの中ではこれとは全く異なる番号が割り当てられている。この番号はこちらを見ると分かるが、Jetson Nanoはそれぞれ13番と6番を指定する必要がある。
 リスト3 リスト2の4〜7行目
リスト3 リスト2の4〜7行目さて、起動したらまずGPIOのセットアップが必要である。それが16〜19行目のGPIO.setmode()とGPIO.setup()の部分である(リスト4)。ちなみに初期値がGPIO.HIGHなのは、GPIOパッケージではHIGHだと電流が流れない(LOWで流れる)という仕様のためである。
 リスト4 リスト2の16〜19行目
リスト4 リスト2の16〜19行目メインとなるのは34〜43行目の部分である(リスト5)。先にも書いたが、class_descという変数には、最終的に確定した対象の種別が文字列で入っている。このため、まずは“cat”という文字列が入っているかどうかをin演算子でチェック。もし入っていたら、次にtabbyも入っているか、同じ様にチェックする。両方入っていれば両方のLEDを点灯、catだけなら緑色は消灯、catが入っていなければ両方とも消灯という、シンプルなものである。
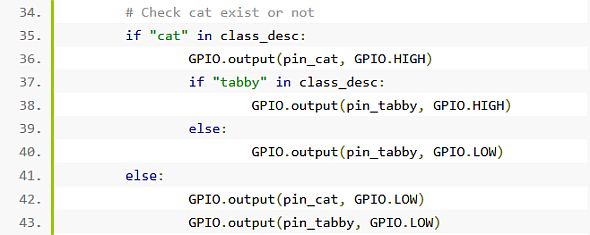 リスト5 リスト5の34〜43行目
リスト5 リスト5の34〜43行目Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 周波数を使って熱電対センサーの測定値を安価な電線でより遠くまで伝送する
- 新画素構造で20%以上高精細化した1/2型モバイル用CMOSイメージセンサー
- フィジカルAIに挑む日の丸連合、「Noetra」とは何か
- フィジカルAI搭載ロボットがモノポリーを実演、1台のPCにモーション制御も統合
- 数μmの傷を手で触って判別できる触覚増幅デバイス、デジタル化も視野に
- 村田製作所が製品データ自動取得サービスの対象範囲を24倍に大幅拡大
- 1年でAfter AIの組織に生まれ変わったソラコム、「トークン資本」の安全な器へ
- 陸上自衛隊から四足歩行型警備ロボットシステムの導入検証業務を受託
- SBOMで脆弱性管理を高度化する新システムを提供
- 日本の「完璧主義」から脱却し中国ヒューマノイドにどう立ち向かうか
コーナーリンク
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。