マブチモーターのノイズ対策:Arduinoで学ぶ基礎からのモーター制御(3)(3/4 ページ)
次に、コンデンサーの容量を0.1μFから22μFに大きくした場合の効果を見てみましょう。次の図4が22μFのコンデンサーをモーターの端子へ並列につないだ場合の周波数成分です。


図(図4)を見ると、何も付けていない状態のグラフ(図2)に比較して、約1MHzから7MHZまでのノイズが低減されているように見えます。
0.1μFのコンデンサーは高い周波数成分のノイズを抑えるために効果があり、22μFのコンデンサーは前者と比べて比較的低い周波数成分のノイズを抑えるのに効果があることが分かりました。次は双方のコンデンサーをつないだ場合の効果を見てみましょう。

2つの異なるコンデンサーをつなぐことで、ほぼ全ての周波数成分のノイズが-60dbを下回ったことが分かります。
なお、今回はコンデンサーをノイズ源(モーター)に対して並列に接続しますので、インピーダンス(抵抗)が低い程、ノイズの除去効果が期待できます。インピーダンスはコンデンサー容量と周波数の関係で表すことができ、ω=2πf Xc=-j(1/ωC) (π=-3.1415926、fは周波数、Xcはインピーダンス、Cはコンデンサー容量、jは虚数)となります。
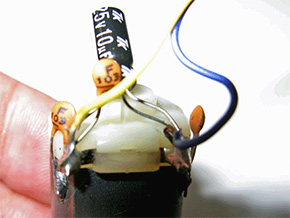 モーターのそれぞれの端子と、モーターのフレーム間にコンデンサーを接続
モーターのそれぞれの端子と、モーターのフレーム間にコンデンサーを接続つまり、周波数が一定であれば容量が大きいほどインピーダンスは下がります。また容量が一定の場合、周波数が高いほどインピーダンスは低くなります。よって容量の大きなコンデンサーは容量の小さなコンデンサーに比べて低い周波数でよりインピーダンスが低くなります。
今回はコンデンサーをモーターの端子に並列接続することでノイズ対策を行いましたが、写真のようにそれぞれの端子とモーターのフレーム間にコンデンサーを接続することで、比較的高い周波数成分のノイズをモーターのフレームの外に出さない効果もあります。
関連記事
 マブチモーターをArduinoで制御する
マブチモーターをArduinoで制御する
「マブチモーター」でもおなじみ「直流ブラシ付きモーター」は安価で入手性もよいモーターです。これをArduinoで制御するとしたら、何を理解して何を用意して、どんなプログラミンが必要でしょうか。実験します。 「マイコンによるモーター制御」を学ぶ前に知っておくべきこと
「マイコンによるモーター制御」を学ぶ前に知っておくべきこと
「動くモノ」の制御ができると手を動かした実感がわくものです。この連載では、マイコンを用いたモーター制御の基礎を学んでいきます。 モータ制御に欠かせない技術“PWM”って何?
モータ制御に欠かせない技術“PWM”って何?
マイコンから電圧を変化させてモータの速度を変えるのは非常に効率が悪い。そこで周期的なパルス信号を発生させるPWMの登場となる。 お手軽モノづくり体験――「あったらいいな」をArduinoでカタチにしてみよう!
お手軽モノづくり体験――「あったらいいな」をArduinoでカタチにしてみよう!
「こんなモノがあったらいいのに……」をArduino(アルドゥイーノ)で実現。電子工作初心者や回路の知識のない人だって大丈夫。筆者と一緒に、頭の中のアイデアをカタチにし、モノづくりの喜びや難しさを体験・体感してみよう! 第1回では、開発環境の準備と電子工作の“Hello World”こと、「エルチカ」に挑戦するぞ!!
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。