コンピュータ・アーキテクトのためのモーター制御:SYSTEM DESIGN JOURNAL(4/5 ページ)
振動制御
FOCの有望な点の1つは、振動とそれに伴う騒音を制御できることです。そうした対策は、エネルギー効率や機械的信頼性の改善の他、機械的強度を必要以上に高く設計する必要性の低減につながります。その結果、例えば民生機器市場で600ドルで販売している洗濯機を、プレミアムモデルとして800ドルで販売することが可能になります。
この原理も簡単です。振動が制御ループの不安定性限界の結果である場合、PIコントローラーのゲインを変更して臨界減衰に近づけることができます。あるいはモーターマウントやドライブシャフト、または負荷の機械的共振の結果である場合は、トルク信号からの励起周波数でエネルギーを遮断することで解消することが原理的に可能です。好都合なことに、FOC手法では3つの時間変化正弦波に変換される前のトルク信号に直接アクセスできるため、共振周波数でエネルギーを遮断するノッチフィルターを取り付けるだけで済みます。
ループゲインへの干渉にせよ、誤差信号のフィルタリングにせよ、システムの動的速度および位置誤差に悪影響を与える可能性がありますが、多くのアプリケーションにおいてシャフト速度の一時的誤差は、円滑で静かな動作に重要な要因ではありません。
振動制御には大きく3つの処理ブロックが必要です。シャフト位置または巻線電流データから周波数スペクトルを抽出する「高速フーリエ変換(FFT)」、スペクトル最大値を特定し、どう対処すべきかを決定する「検出・応答ブロック」、そしてトルク信号から原因周波数を除去する1個以上の「プログラマブルノッチフィルタ」です(図3)。
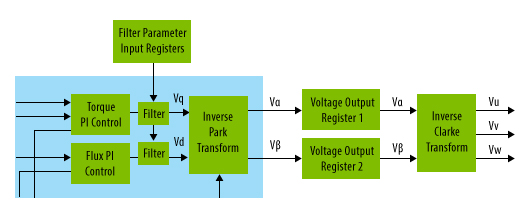 図3.トルク・コントローラーと逆パーク変換の間のプログラマブルノッチフィルターにより、システムの共振振動を改善することが可能です
図3.トルク・コントローラーと逆パーク変換の間のプログラマブルノッチフィルターにより、システムの共振振動を改善することが可能ですどのブロックも、アプリケーションに応じて適切に設計する必要があります。FFTは、共振が一定または徐々に変化するシステムではスタートアップタスクまたはバックグラウンドタスクにすることも可能ですが、共振がすぐに移動する可能性があるシステムでは連続実行する必要があります。応答ブロックはアプリケーションによって大きく異なります。PIループ・ゲインの調整、フィルタの追加、フィルターパラメーターの選択に関する決定は、電気機械システム全体の特性に大きく左右されるからです。そのため、システムについてかなり詳細な知識がないと、振動制御に必要な計算負荷を推定することは不可能です。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- ルネサスが高崎工場を閉鎖へ、かつてはSiCデバイス生産の計画も
- AlteraはITバブルを切り抜け全盛期へ、時代を先取りしたArmコア+FPGAの製品も
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- “Hello, World”と「Lチカ」の共通点
- 強度20倍のフィルム採用で折り目が目立ちにくい折りたたみスマホの新技術
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 基本波で625MHzまでの高周波に対応する次世代水晶デバイスを本格量産を開始
- インテル“ヤマネコ”の実力は?/「Renesas 365」は3カ月かかる作業が1分に
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。