いかに速く安定して目標値に到達させるか:無償ソフトで技術計算しよう【制御工学応用編】(3)(1/2 ページ)
【制御工学応用編】では、制御系の応答性や安定性を評価する方法とPIDコントローラーの設計について説明する。今回は、PIDコントローラー付バネ・マス・ダンパモデルを元に、指示された目標値に「いかに早く安定して」到達させるかについて解説する。
制御工学応用編として、前回は安定性について説明しました。安定に動作すると、次は、より良い制御が課題となります。今回は、指示された目標値に、いかに速く安定して到達させるかについて、PIDコントローラー付バネ・マス・ダンパモデルを元に説明します。
フィードバック制御系の過渡特性
「いかに速く安定して」という定性的な目標を達成させるには、まず評価指標を明確にする必要があります。そこで、評価指標として過渡特性の表し方について説明します。
フィードバック制御系の過渡特性は、速応性と安定性で評価されます。速応性は入力に対する応答の速さで、立ち上がり時間などで表されます。一方の安定性は応答の振動しにくさで、最大行過ぎ量や整定時間などで表されます。過渡特性を表す指標はこれ以外にもありますが、今回は最大行過ぎ量、立ち上がり時間、整定時間について、図1に基づいて説明し、FreeMatで算出してみます。
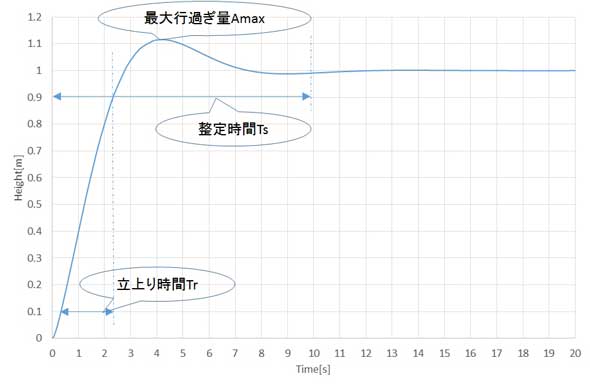 図1:過渡特性
図1:過渡特性最大行過ぎ量Amaxは、出力が目標値を超え、最大となる値です。また、立上り時間Trは出力が目標値の10%を超え90%に達するまでの時間です。ここでは、目標値は1とします。整定時間Tsは、出力が目標値のある誤差範囲内に達するまでの時間です。一般に目標値の±2%や±5%が誤差範囲とされます。ここでは、±2%とします。
グラフから読み取っても構いませんが、最大行過ぎ量、立上り時間、整定時間もFreeMatに計算させるように、ex510.m(前回参照)を改造したのがex511.mです。
clear;m=1;c=1;k=10;kp=5;ki=14.6;kd=5;yset=1;
dydt=@(t,y) [y(2);(-(c+kd)*y(2)-(k+kp)*y(1)+kp*yset+y(3))/m;ki*(yset-y(1))];
[t,y]=ode45(dydt,[0,20],[0;0;0]);yy=y(:,1);
plot(t,yy);grid('on');
xlabel('Time[s]');ylabel('Height[m]');
Amax=max(yy);
Tr=max(t(find(yy>0.1 & yy<0.9)))-min(t(find(yy>0.1 & yy<0.9)));
Ts=max(t(find(yy<0.98 | yy>1.02)));
title(['Amax=',num2str(Amax),' Tr=',num2str(Tr),' Ts=',num2str(Ts)]);
変更点として、まず処理しやすいように、数値計算結果のうち、変位のデータである「y(:,1)」を「yy」という変数に代入します。次に最大行過ぎ量はyyの最大値と考え、「max(yy)」で最大値を求めます。立ち上り時間は、目標値(今回は1)の10〜90%となる時間であるため、「find(yy>0.1 & yy<0.9)」として、yyの値が0.1超え0.9未満となる箇所を求めて、時間配列tに渡します。次に、得られた時間配列の最大値から最小値を引けばyyが0.1超え0.9となる時間、すなわち立上り時間が求められます。整定時間は、目標値の±2%となる時間であるため、「find(yy<0.98 | yy>1.02)」として、yyが0.98を下回るか、1.02を上回る箇所を求めて、時間配列tに渡します。次に、得られた時間配列のうち最大値が整定時間となります。以上の結果をグラフのタイトル欄に表示させています。
Excelの重回帰分析とソルバーによる最適値の探索
ex511.m内のkp、ki、kdを書き換えて動作させると、PIDコントローラーを任意の値に設定した結果が得られます。試行錯誤で最適な値を見つけるという手もありますが、変数が3種類もあるため、効率的とはいえません。そこで、Excelの重回帰分析とソルバーを用いて、PIDコントローラーの最適値を探索してみます。ここで、最適の目標としては、行過ぎ量が目標値に対して1.1倍以下、整定時間が3秒以内で、立上り時間ができるだけ短くなるようにします。
概略を説明すると、適当なkp、ki、kdの組み合わせで、立上り時間Tr、行過ぎ量Amax、整定時間Tsをex511.mで求めます。次いで、重回帰分析で、Tr、Amax、Tsの回帰式を求めます。その後、ソルバーで目標を満足するkp、ki、kdをExcelに探索させます。
では、順に説明して行きます。はじめに、Excelのデフォルトでは分析ツールとソルバーは表示されないため、これを設定します(既に設定済の方は以下は不要です)。ファイル→オプション→アドインと進んで、下にある「設定」ボタンをクリックすると、アドインの一覧が表示されます。ここで、「分析ツール」と「ソルバー」のチェックボックスをクリックしてチェックマークを入れて、OKをクリックすると、リボンのデータグループの右側に「ソルバー」「データ分析」という表示がでます。
準備ができたら、Excelシートの適当な箇所に、図2に示すようにKp、ki、kdの組み合わせを入力します。
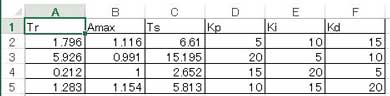 図2:条件設定と解析結果の入力
図2:条件設定と解析結果の入力ここでは、kp、ki、kdは5〜20の範囲とします。それぞれの組み合わせをex511.mに入力し、表示されたグラフタイトルから、Excelシートの立上り時間Tr、行過ぎ量Amax、整定時間Tsの欄に結果を転記します。
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 使用中に発火、サーキュレーター10万台をリコール
- 図面AIに「動かせる3Dモデル」の生成機能、関節や可動域を自動認識
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 幾何公差の基準「データム」を理解しよう
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- Autodesk Fusionで設計した超小型衛星「PRELUDE」が軌道投入、初期運用へ







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。