ブロック線図を使ったPIDコントローラーのシミュレーション:無償ソフトで技術計算しよう【制御工学基礎編】(3)(2/3 ページ)
一次遅れ系、二次遅れ系
同様にして、一次遅れ系のブロック線図を作成すると、図8に示すように、積分要素と比例要素との組み合わせになります。
 図8:一次遅れ系のブロック線図
図8:一次遅れ系のブロック線図演算子法では、sを掛ける操作は微分操作を、sで割る操作は積分操作を、定数を掛ける操作は比例操作を表します。従って、ブロック内に「s」とあるのは微分要素、「1/s」とあるのは積分要素、例えば「a」などの定数があるのは比例要素と呼びます。
同じく、二次遅れ系をブロック線図で表すと、図9に示すように、2つの一次遅れ系の直列接続で表されます。
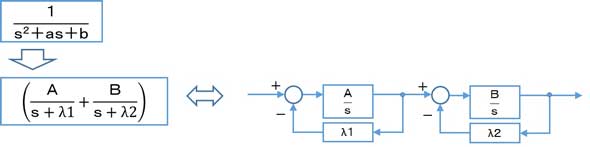 図9:二次遅れ系のブロック線図
図9:二次遅れ系のブロック線図このように、最小要素まで分解できるものを線形制御系と呼び、古典制御理論は線形制御系を対象としています。
PIDコントローラー
では【制御工学基礎編】(1)で紹介したPIDコントローラー付のバネ・マス・ダンパ系のブロック線図を作成し、伝達関数を求めてみます。次いで、伝達関数を微分方程式にして、FreeMatでシミュレートしてみます。
PIDコントローラーは比例要素、積分要素、微分要素からなるもので、制御対象の前段に置いて、フィードバックループを構成して使用します。従って、比例定数をkp、積分定数をki、微分定数をkdとすると、ブロック線図は図10のようになります。
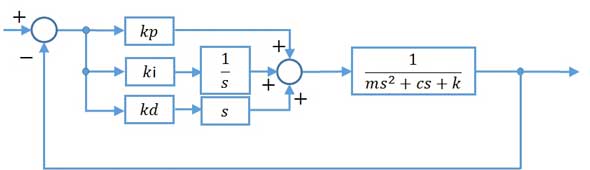 図10:PIDコントローラー付バネ・マス・ダンパ系のブロック線図
図10:PIDコントローラー付バネ・マス・ダンパ系のブロック線図このブロック線図から伝達関数を求めてみます。
便宜上、入力をU、出力をYとすると、フィードバックした結果とPIDコントローラーと制御対象との伝達関数の積が出力Yとなるため、以下の式が成り立ちます。
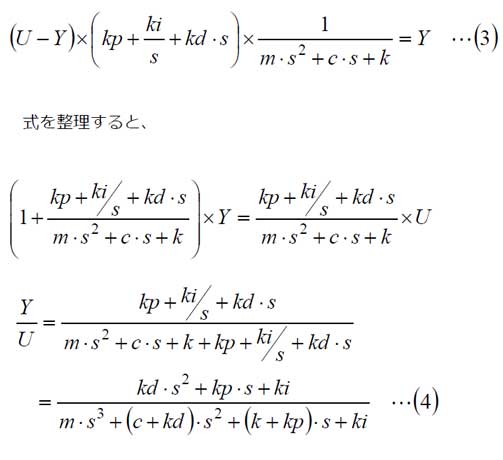
となり、(4)式のように伝達関数が求まります。この伝達関数を基に、応答性や安定性を評価します。詳細については、応用編で説明します。
さて、(4)式の伝達関数にysetの入力を与えた場合の応答をFreeMatで計算してみましょう。
(4)式を下記のように変形します。

演算子法では、sのべき乗は高階微分,1/sは積分になるため、

となります。ここで、入力uはyset(一定値)であるため、
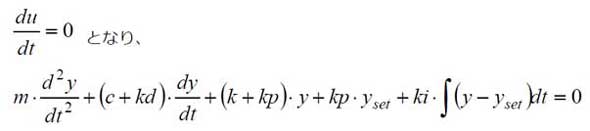
となります
FreeMatのode45で計算するには1階の微分にしなければならないため、y1、y2、y3を導入し、下記のように変形します。
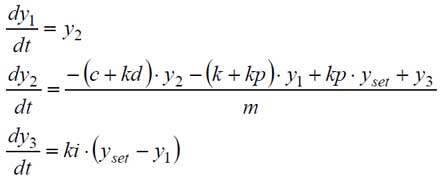
となり、これは【制御工学基礎編】(1)でバネ・マス・ダンパ系にPIDコントローラーを追加した際の考え方と同じ式になります。
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 使用中に発火、サーキュレーター10万台をリコール
- 図面AIに「動かせる3Dモデル」の生成機能、関節や可動域を自動認識
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- 幾何公差の基準「データム」を理解しよう
- Autodesk Fusionで設計した超小型衛星「PRELUDE」が軌道投入、初期運用へ







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。