Pepper偵乽儔僕僆懱憖戞2乿傪幚墘偝偣傞丗Pepper偱巒傔傞儘儃僢僩僾儘僌儔儈儞僌乮2乯乮2/4 儁乕僕乯
儌乕僔儑儞偺婎杮偼億乕僘
丂偱偼幚嵺偵丄GUI儀乕僗偺奐敪娐嫬乽Choregraphe乿偱儌乕僔儑儞傪嶌偭偰傒傛偆丅Timeline儃僢僋僗傪巊偆慜偵丄傑偢妎偊偰梸偟偄偺偑億乕僘偺巜掕曽朄偩丅億乕僘偺僨乕僞偼丄儌乕僔儑儞傪峔惉偡傞婎杮梫慺偱偁傞丅億乕僘傪巜掕偡傞偵偼丄Pepper幚婡傪巊偆曽朄偲壖憐儘儃僢僩傪巊偆曽朄偑偁傞偺偩偑丄傑偢偼壖憐儘儃僢僩偺曽朄偐傜尒偰偄偔丅
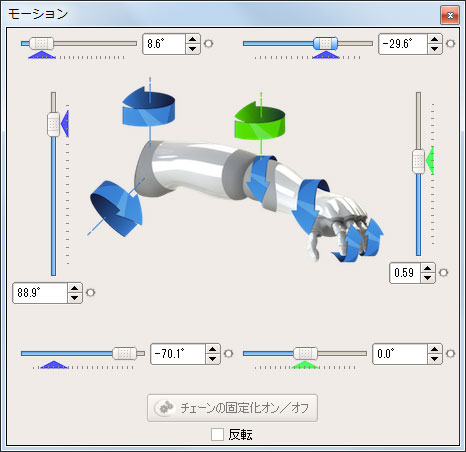
丂Choregraphe塃壓偵昞帵偝傟偰偄傞壖憐儘儃僢僩偺夋柺偱丄摦偐偟偨偄応強傪僋儕僢僋偡傞偲丄僇儔僼儖側儕儞僌偑尰傟傞丅偙傟偼乽儘乕僥乕僔儑儞僴儞僪儖乿偲屇偽傟傞傕偺偱丄1偮偺儕儞僌偑1帺桼搙偵懳墳偟偰偄傞丅嵍僪儔僢僌偱儕儞僌傪夞偣偽丄懳墳偡傞娭愡偺妏搙傪曄偊傞偙偲偑偱偒傞丅儕儞僌偑憖嶌偟偵偔偄妏搙偩偭偨傜丄塃僪儔僢僌偱Pepper偺岦偒傪曄偊傟偽椙偄丅
 榬傪慜偵弌偡応崌偼丄椢怓偺儕儞僌傪夞偣偽椙偄
榬傪慜偵弌偡応崌偼丄椢怓偺儕儞僌傪夞偣偽椙偄丂傑偨摨帪偵丄儌乕僔儑儞僟僀傾儘僌偺僂傿儞僪僂傕昞帵偝傟偰偄偨偼偢偩丅偙偺僂傿儞僪僂偺僗儔僀僟乕傪巊偭偰傕丄慡偔摨偠傛偆偵娭愡傪摦偐偡偙偲偑偱偒傞丅捈愙丄悢帤傪擖椡偡傞偙偲傕偱偒傞偺偱丄妏搙傪惓妋偵巜掕偟偨偄応崌偼曋棙偩丅偳偪傜偱傕峔傢側偄偺偱丄巊偄傗偡偄曽傪巊偊偽椙偄偩傠偆丅
 儌乕僔儑儞僟僀傾儘僌偩偲丄悢帤乮妏搙乯擖椡傕壜擻
儌乕僔儑儞僟僀傾儘僌偩偲丄悢帤乮妏搙乯擖椡傕壜擻丂偙偺嶌嬈傪奺娭愡偵懳偟孞傝曉偡偙偲偱丄1偮偺億乕僘傪嶌偭偰偄偔丅摦偐偡娭愡偑懡偄偲庤娫偑偐偐傞偑丄傕偟椉榬偑嵍塃懳徧偺摦偒偱偁傟偽丄儌乕僔儑儞僟僀傾儘僌偱乽斀揮乿偵僠僃僢僋傪擖傟偰偍偗偽丄曅榬傪摦偐偡偩偗偱斀懳偺榬偵傕曄峏偑斀塮偝傟傞丅娭愡偺峔憿忋丄偳偆偟偰傕幚尰偱偒側偄億乕僘偑偁傞傕偺偺丄偙傟偼僴乕僪僂僃傾忋偺巇條側偺偱丄摦偐偣傞斖埻偱丄側傞傋偔偦偺億乕僘偵嬤偯偗傞偟偐側偄丅
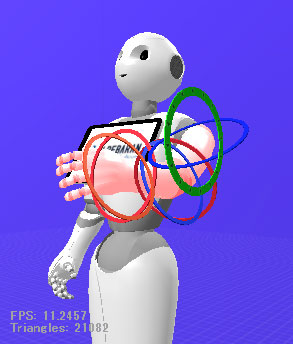
丂壖憐儘儃僢僩偩偲丄摦偐偡娭愡偑懡偄偲擖椡偑偪傚偭偲戝曄偩偑丄Pepper幚婡偑偁傟偽丄儘儃僢僩偵怗傝側偑傜丄捈姶揑側億乕僘偺巜掕傕壜擻偩丅Pepper偵愙懕偟偨屻丄Choregraphe偺儃僞儞傪墴偟偰丄Pepper傪傾僯儊乕僔儑儞儌乕僪偵曄峏丅儌乕僪偑曄傢偭偰偄傟偽丄Pepper偺栚偑僆儗儞僕怓偵岝偭偰偄傞偼偢偩丅
丂偙偙偱丄椺偊偽Pepper偺嵍榬傪摦偐偟偨偄偺偱偁傟偽丄嵍庤偺峛偵僞僢僠丅怗偭偰偄傞娫丄嵍榬偺儌乕僞乕偑扙椡偡傞偺偱丄岲偒側傛偆偵摦偐偟偰丄億乕僘傪寛傔傞偙偲偑偱偒傞丅傾僯儊乕僔儑儞儌乕僪偱摦偐偟偨儘儃僢僩偺億乕僘偼丄偦偺傑傑Choregraphe偵斀塮偝傟傞丅偮傑傝丄儘儃僢僩傪擖椡僨僶僀僗偲偟偰丄億乕僘傪巜掕偡傞傢偗偩丅
丂嶌偭偨億乕僘偼丄Choregraphe塃忋偺億乕僘儔僀僽儔儕偵曐懚偡傞偙偲傕偱偒傞丅椙偔巊偆億乕僘偑偁傟偽丄偙偙偱搊榐偟偰偍偔偲椙偄偩傠偆丅億乕僘儔僀僽儔儕偺億乕僘傪僟僽儖僋儕僢僋偡傞偲丄幚婡乛壖憐儘儃僢僩偺億乕僘偵斀塮偝傟傞丅Pepper偺億乕僘傪弶婜忬懺偵栠偟偨偄偲偒偼丄乽Stand乿傑偨偼乽StandInit乿傪僟僽儖僋儕僢僋偡傟偽椙偄丅
丂側偍Pepper偵偼丄帺彎傪杊巭偡傞婡擻偑偁傞丅椺偊偽丄傢偞偲榬傪摢偵摉偰傛偆偲偟偰傒偰傕丄徴撍偟側偄傛偆偵丄帺摦偱億乕僘偑廋惓偝傟傞丅偙偺婡擻偺偍偐偘偱埨慡惈偼崅偄偺偩偑丄梊憐偲堘偭偨摦偒偵側傞偙偲傕偁傞偺偱拲堄偑昁梫偩丅
Copyright © ITmedia, Inc. All Rights Reserved.
儘儃僢僩偺婰帠儔儞僉儞僌
- 嬃堎揑側墘嶼乛塣摦惈擻傪寭偹旛偊偨師悽戙將宆儘儃乽PUDU D5乿僔儕乕僘偑抋惗
- 偒傘傫偔傫傕嶲壛丄儘儃僢僩僗僞乕僩偑儔儃奐愝
- ROS傪巊偆庤弴丄僷僢働乕僕偲僔儈儏儗乕僞偺妶梡
- 乽偁偺尰応偱摦偗傞儘儃僢僩偼Quince偟偐側偄乿乣尨敪儘儃僢僩傪奐敪偡傞愮梩岺戝丒彫桍暃強挿乮慜曇乯
- 側偤儘儃僢僩偵僋儔僂僪偑昁梫側偺偐丠
- 儘儃僢僩岦偗僴乕僪僂僃傾拪徾壔儗僀儎乕乽OpenEL 2.0乿偲偼壗偐
- 僔乕儖偱僨僐傟傞丄5000墌埲壓偍憒彍儘儃僢僩
- 嵭奞偵儘儃僢僩媄弍偱棫偪岦偐偆丄儗僗僉儏乕儘儃僢僩偺尰嵼偲枹棃
- 乽僞僠僐儅乿偑2偮偺巔偱幚懱壔丄僐儈儏僯働乕僔儑儞儘儃僢僩偺幮夛幚憰偵挧傓
- Pepper偑塩嬈椡傪嫮偔偡傞丄扴摉幰偲儘儃僢僩偑楢摦偟偰偍弌寎偊
僐乕僫乕儕儞僋



![]() ITmedia偼傾僀僥傿儊僨傿傾姅幃夛幮偺搊榐彜昗偱偡丅
ITmedia偼傾僀僥傿儊僨傿傾姅幃夛幮偺搊榐彜昗偱偡丅