ロボットに必要な要素技術:次世代ロボット概論(2)
ホンダのASIMOを例に、ロボットに必要な要素技術を紹介する。組み込みシステムとロボットの違いとは?
前回は「ロボットとは?」をテーマに、いまだ錯綜するロボットの定義について考察した。今回も引き続き、産業技術総合研究所(以下、産総研)大場 光太郎氏の講演内容を基に、まずはヒューマノイドロボットの一例として、1996年にホンダから発表されたASIMOの要素技術について触れ、その後、日本と海外のロボット開発状況を紹介する。
開発者が語ったASIMOのコア技術
ASIMOは、大きく分けて頭部にある人工知能とセンサ(画像/音声/姿勢/力など)、アクチュエータ、ネットワーク、制御技術、で構成されている。各部位ごとに要素分けした画像1を見ても、広域な要素技術が絡み合っていることが分かる。
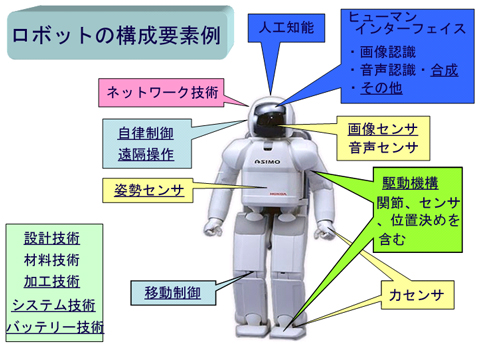 画像1 ASIMOを例にした、ロボットの構成要素技術(大場氏の発表資料より)
画像1 ASIMOを例にした、ロボットの構成要素技術(大場氏の発表資料より) 「なぜASIMOが完成したのか、そのコア技術とは何かをASIMOの研究者に聞くと、モータだという答えが返ってきた。彼(研究者)らはASIMOを作るに当たり、まずはモータを買ってきて、コイルを外し、モータの巻き線(銅線)を変えながら、何度も研究を重ねた。なぜそんなことをしたかというと、ご存知の通り、モータというのは回転して何ぼの部品。しかし、当初ASIMOに取り付けたモータは、回らなかったという」
「人間というのは多くの初期トルクを使っている。よって、ほとんど初期トルクだけを稼ぐモータを組み込まなければ、人間と同じような作業をさせることはできない。洗濯機や掃除機などで使用されているモータだと、回転しないうちにトルクが動くため、初期トルクが得られない。単純に巻き線を太くすれば力が上がるかというと、そうではなかった。彼らはASIMOに人間と同程度の動きをさせるために、巻き線を何度も交換することで、独自のモータを開発した」
「次にブレイクスルーとなった技術は、バッテリーだった。初代のASIMOは、背中に巨大なランドセル(バッテリー)を背負っていたが、2代目、3代目になると、なくなっている。なぜそれができたかというと、携帯電話やPCなどにも使用されているリチウムイオン電池の効率が上がり、サイズも小さくなったためで、それによってASIMOのバッテリーも背中部分に収まるようになった。するとロボット全体の重量が非常に軽くなり、逆にモータのトルクがいらなくなってきた。ロボットは総合技術なので、1つの技術に変化があると制御が楽になる(今回の場合はバッテリーが小型化したことで、モータの負荷が減った)」
大場氏は次に、2009年3月産総研が発表したヒューマノイドロボット「HRP-4C」について触れた。HRP-4Cを作るに当たり、最も苦労したのは足首だったという。
「女性の形を真似するために身長、体重、体形を考えたとき、ポイントとなったのは、足首をどこまで細くできるかだった。足首が細くなると踏ん張れないため、制御が難しいという技術的な問題がある。ロボットの世界というのは、何か1つ技術が加わると、全体的な技術が上がり、逆に、違う形態にしようとすると、とたんに難しくなる。要するに統合技術の塊だと思ってもらえれば良い」
日本が強いロボット技術。海外との比較
次に日本ロボット産業の現状を紹介する。大場氏によると、海外と比較した場合の日本ロボット産業は、その用途が非常に明確だという。「日本は産業用ロボットをメインに、ヒューマノイドロボットがそこそこという形で動いて(開発して)いるが、米を見ると、宇宙開発と、医療系(手術で使用されるロボット)、軍事。ロボットに思い入れを持つのは日本人の悪いくせなのかもしれないが、自律系のロボットを作る日本に対し、海外はロボットに対してある意味で冷めた見方をしていて、遠隔操作などに有効なツールの1つと考えている」
 画像2 日米のロボット産業比較(大場氏の発表資料より)
画像2 日米のロボット産業比較(大場氏の発表資料より) 参考:総合科学技術会議第24回資料。近年では、手術時にメス(切り口)を入れず、代わりに穴を開けることで、そこに水か空気を入れて膨らませ、内視鏡で患部を見ながら手術する手法がある。そうした場合に使用されるロボットとして優れたものが海外で開発されているが、日本では認可が通っていないために限られた機関でしか使用できないことがあるという
現状
現在、ロボットを製造するメーカー(中でもヒューマノイドロボットのメーカー)は、各社の独自基準で「こういうロボットを作っている」という報告書を経済産業省に提出し、その上で、専門家がその報告書を読み、このくらいだったら大丈夫だろう、という具合に返事(許可)が出ているという。
「技術だけでは、ロボットは世の中に出て行かない。つくば万博では、万が一子供が指を出した場合にも怪我をしないようにと、デザインを変更した例がある。メーカー各社の報告書を基にしたロボットの安全ガイドラインがあるが、これはあくまでも仕様で、法規制があるわけではない。経済産業省では現在、国際基準および安全試験基準を策定しようとする動きが進められている」
次回は、技術力があっても世の中に出すことができない「現代社会におけるロボットの課題」について触れる。(次回に続く)
関連記事
Copyright © ITmedia, Inc. All Rights Reserved.
ロボットの記事ランキング
- 驚異的な演算/運動性能を兼ね備えた次世代犬型ロボ「PUDU D5」シリーズが誕生
- きゅんくんも参加、ロボットスタートがラボ開設
- ROSを使う手順、パッケージとシミュレータの活用
- 「あの現場で動けるロボットはQuinceしかない」〜原発ロボットを開発する千葉工大・小柳副所長(前編)
- 保険適用が拡大する手術支援ロボット「da Vinci」、デジタル活用でアプリも投入
- なぜロボットにクラウドが必要なのか?
- 「EMIEW3」に見えた、ヒトとロボットの共生
- “着る”歩行支援ロボットを2021年夏に発売へ、人の動作を見極めて正しく支援
- 初期費用の安さがウリ、東京理科大発ベンチャーの「マッスルスーツ」
- Pepperが営業力を強くする、担当者とロボットが連動してお出迎え
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。