魅せる! 笑わせる! 新設「アーキテクト部門」に大注目 〜ETロボコン2013チャンピオンシップ大会〜:ETロボコン・リポート(4/5 ページ)
戦略性が高まったデベロッパー部門
デベロッパー部門は、基本的に前回までの競技を踏襲する。コースは、前半の「ベーシックステージ」と後半の「ボーナスステージ」で構成されており、ベーシックステージの走行タイムからボーナスタイム(最大50秒)を引いた時間が競技の結果(リザルトタイム)となる。ボーナスステージには“難所”として、インコース側にルックアップゲート、アウトコース側にシーソーがあり、通過できればボーナスタイムを得ることができる。

 (左)画像12 左奥からスタートして、各コーナーに第1〜4の中間ゲートが置かれている。ベーシックステージのゴールは左奥のピンクのラインがあるところ/(右)画像13 ルックアップゲート。走行体を傾けないと通過できないので、ラインを見失いやすい。1回通過してから戻ってまた通過するとダブル達成となる ※画像クリックで拡大表示
(左)画像12 左奥からスタートして、各コーナーに第1〜4の中間ゲートが置かれている。ベーシックステージのゴールは左奥のピンクのラインがあるところ/(右)画像13 ルックアップゲート。走行体を傾けないと通過できないので、ラインを見失いやすい。1回通過してから戻ってまた通過するとダブル達成となる ※画像クリックで拡大表示
 (左)画像14 シーソー。中央を通過したときのバランスが難しく、転倒するロボットも多かった。こちらも、ボーナスはシングル(5秒)とダブル(10秒)がある/(右)画像15 インコースもアウトコースも最後はガレージ(左手前)。ブロックの壁に接触せずに止まることができたらボーナス(5秒) ※画像クリックで拡大表示
(左)画像14 シーソー。中央を通過したときのバランスが難しく、転倒するロボットも多かった。こちらも、ボーナスはシングル(5秒)とダブル(10秒)がある/(右)画像15 インコースもアウトコースも最後はガレージ(左手前)。ブロックの壁に接触せずに止まることができたらボーナス(5秒) ※画像クリックで拡大表示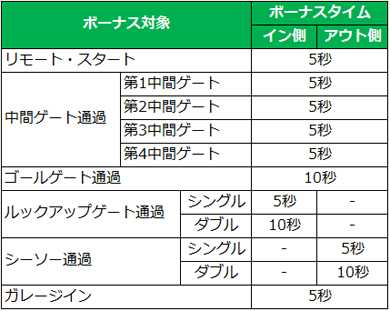 表1 ボーナスタイムの一覧
表1 ボーナスタイムの一覧アーキテクト部門の新設によって、デベロッパー部門はより初級者向けとしての位置付けが明確になった。前回に比べて、ベーシックステージが長くなっており、基本であるライントレース走行を重視。その半面、ボーナスステージでは、難所が2カ所から1カ所に削減され、完走が容易になった。結果として、前回はボーナスステージの完走率が10%しかなかったのに、今回は50%以上にまで跳ね上がった。
また、その他にもルールの大きな変更が2つあった。1つは、走行体の尻尾を接地させたまま走る「尻尾走行」が禁止になったこと。尻尾走行は3点接地で安定するため、走行スピードを速くすることができる。かなり大きな効果があるため、最近ではほとんどのチームが尻尾走行を採用していたが、これが禁止となったことで、本来の倒立振子ロボットとしてのスタイルで走行する必要がある。
もう1つは、コースのショートカットが可能になったこと。前回は、中間ゲートは全て通る必要があったのだが、今回、通過が必須なのは第1・第4だけで、第2・第3は通過しなくても構わない。通過しない場合は、その分のボーナスタイム(各5秒)がもらえなくなってしまうが、ショートカットによって5秒以上タイムを短縮できるようなら、やった方が得だ。どこでどうショートカットしたら早くなるか、自由度が増したことで、競技の戦略性が高まったといえる。
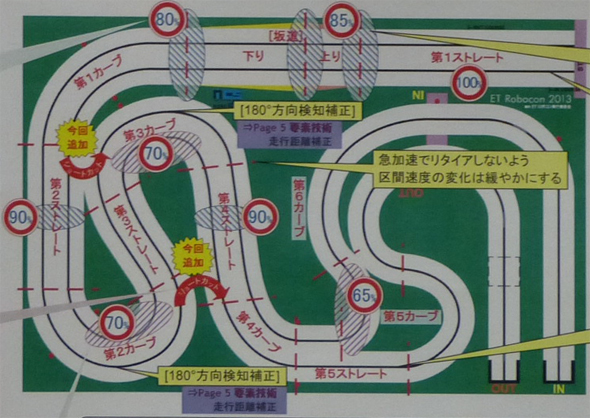 画像16 インコースの場合は第1中間ゲートの後、アウトコースの場合は第2中間ゲートの後でショートカットするチームが多かった
画像16 インコースの場合は第1中間ゲートの後、アウトコースの場合は第2中間ゲートの後でショートカットするチームが多かったただショートカット走行にはリスクも伴う。道しるべとなるラインをあえて外すわけで、最悪の場合、コースを見失ってしまうこともあり得る。そのリスクを最小にするために、多くのチームはなるべくラインが近いところでショートカットを行っていたのだが、そんな中、かなり思い切ったショートカットを披露していたのが優勝した「じぇっとあーる」(ジェイテクト)だ。
同チームは第1中間ゲートを通過後すぐにショートカットを行っていたのだが、その後しばらくラインを無視するように最短距離を走行。ラインに復帰後、さらに第4中間ゲートの後でも再度ショートカットするなど、走行距離の短縮が徹底していた。走行自体も安定して速く、2回の走行タイムの合計は46.3秒。これは第2位とは10秒近い差があり、まさに圧巻の走りだった。ボーナスステージも確実に完走し、リザルトタイム(−43.7秒)は文句なしのトップ。
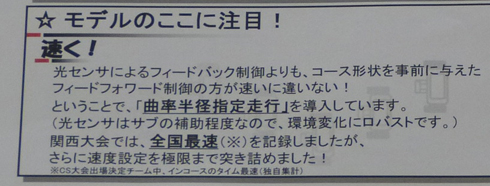 画像17 「じぇっとあーる」はフィードフォワード制御の「曲率半径指定走行」を実装しているとか。ラインを無視していたのはこの走行だろうか
画像17 「じぇっとあーる」はフィードフォワード制御の「曲率半径指定走行」を実装しているとか。ラインを無視していたのはこの走行だろうかじぇっとあーるはモデル審査でも第1位となっており、総合での“完全優勝”を達成。驚くのは、このチーム、今回が初出場とのこと。先行する他のチームに追い付くため、前回のチャンピオンシップ大会の全出場チームのモデルを調査・分析、定石を把握した上で、改良を加えていったという。そういった地道な努力が、初出場ながら競技・モデル審査ともに第1位という快挙につながった。
 画像18 総合優勝の「じぇっとあーる」(ジェイテクト)チーム
画像18 総合優勝の「じぇっとあーる」(ジェイテクト)チームCopyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。