「ロボット」から「プロジェクションマッピング」まで――Kinect活用でビジネス化を目指せ!!【前編】:Kinect for Windows Contest 2013 リポート(2)(2/3 ページ)
チーム:リサーチキング/作品:自律巡回 Kinect警備ロボ Pochi Mk-II
10作品中、唯一ロボットをテーマにしたのが3番手のリサーチキングだ。彼らは、もともとKinect for Windowsセンサーを“自律行動するロボットの目”として活用することを考え、「Kinect盲導犬 ポチ」の開発を提案してきたという。しかし、安全性、コスト、時間などの壁にぶつかり、「あらためてロボットという観点で、製品化できそうなものを検討。その答えとして、Kinect for Windowsセンサーを使って暗闇でも自律巡回できる“警備ロボット”を考案した。最初の目的であった盲導犬ロボットの流れから、そのロボットを『自律巡回 Kinect警備ロボ Pochi Mk-II(以下、Pochi Mk-II)』と命名した」(リサーチキング)。
運用イメージは次の通りだ。Pochi Mk-IIをフロアの警備に当たらせ、Kinect for Windowsセンサーで取得した画像や異常情報をリアルタイムにサーバ/クラウドなどにアップロードする。人間の警備員は管理室にあるモニター用PCからサーバ/クラウド上のサービスにアクセスし、それら情報を閲覧したり、制御指示を巡回中のPochi Mk-IIに送ったりできる。また、複数のPochi Mk-IIを別々のフロアに配備し、巡回させることも可能だ。「自律巡回ロボットが低価格で実現できれば、警備員の人件費の削減に効果を発揮できるだろう」とリサーチキングはアピールする。
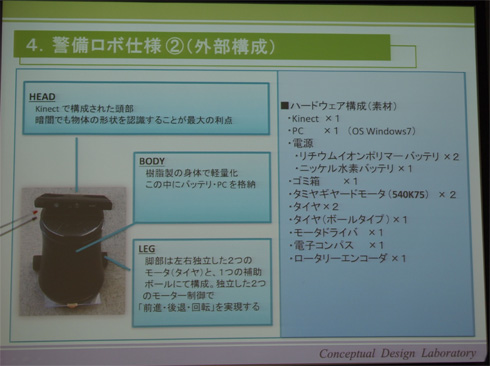 外部構成
外部構成Pochi Mk-IIの頭部にKinect for Windowsセンサーを配置。ゴミ箱をベースとした樹脂製のボディの中にはPC、モータコントローラ用の「Arduino」、3種類のバッテリー(Kinect用、PC用、モータコントローラ用)、各種センサー(方角センサー、速度センサー)などを搭載。車輪を巧みに動かし、壁などの障害物を回避しながら、前進・後退・旋回などが行える。
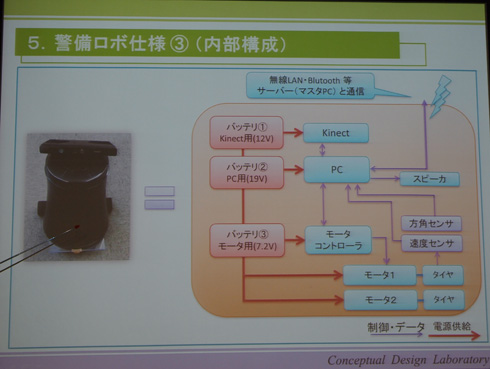 内部構成
内部構成Kinect for Windowsセンサーによる深度情報、カラー情報。そして、別途用意した方角・速度センサーなどを活用し、「自動巡回」「夜間巡回(無灯巡回)」「簡易エリアマッピング」「データ転送」の4つの基本機能を実現する。また、Pochi Mk-IIから送られる情報を基にしたモニターPC機能も開発した。「さらに足回り、人工知能、マッピング性能、安全性などを強化していけば、将来的に警備の他にも、災害救助や盲導犬、コミュニケーションツールとして発展させられるのではないか」(リサーチキング)と今後の可能性を訴えた。
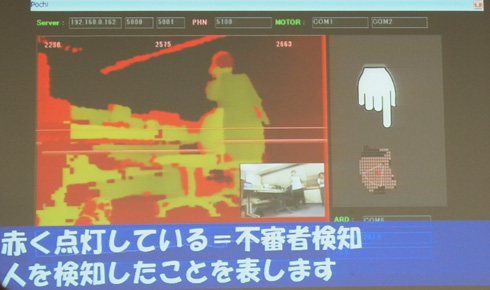 デモの様子
デモの様子

チーム:four-dee/作品:フェイスライン測定器「face4D」
見事グランプリに輝いたfour-dee(岩瀬聡一郎さん)は、Kinect for Windowsセンサーを活用したフェイスライン測定器「face4D」を開発した。岩瀬さんは「Kinect for WindowsセンサーをはじめとするDepthセンサーには大きな夢がある」とし、3次元計測技術を活用したビジネスを模索。今回のface4Dの開発に至ったという。
プレゼンテーションの冒頭、3次元計測技術の発展性とこの作品にかける思いについて、岩瀬さんは「3Dプリンタが家庭にも普及していけば、出力したモノの品質を検査するために3次元計測技術が役立つのではないか。あるいは、クルマの自動運転でも環境認識や環境変化を捉えるために、精度の高い3次元計測技術が役立つのではないか。私はそう信じ、この分野に時間とお金を投資したいと考えている。3次元計測技術を生かしたビジネスを今すぐにでも立ち上げたい!」と訴えた。
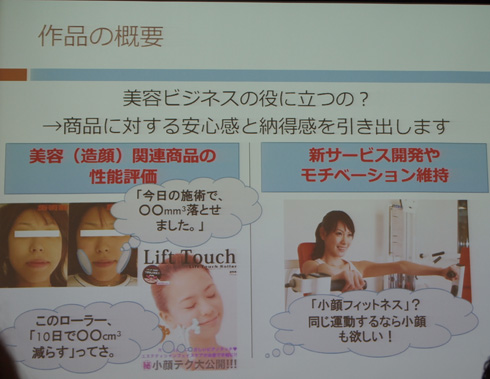 作品の概要
作品の概要3次元計測技術の活用の場として、岩瀬さんが注目したのは、美容ビジネスだ。エステや美容器具で施術した部位を、3次元計測することで“数値”としてきちんと可視化できると考えたからだ。これまで、美容ビジネス関連の商品やサービスは、その性能・効果を具体的な数値として表すことが難しく、どうしても曖昧(あいまい)な表現しかできなかった。そのため「消費者は、安心感や納得感が得られなかった」と岩瀬さんは指摘。face4Dであれば、例えば、数カ月間かけて数ミリだけ変化させるようなシビアな商品・サービスであっても、その性能を数値化して消費者にアピールできる。また、現在、飽和市場となっているフィットネスクラブであっても美容効果のある新しいメニューを開発し、その性能を数値として消費者にアピールすることが可能になる。
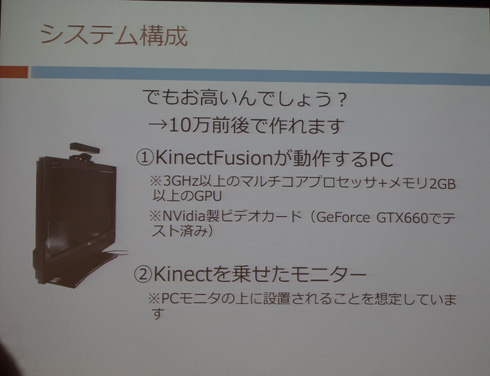 システム構成
システム構成face4Dのシステム構成は、Kinect for Windowsセンサーとそれを動作させるためのPC環境のみ。他の作品になかった最大のポイントとしては、SDKのバージョン1.7で追加された「Kinect Fusion」の機能を活用していることだ。「これにより(Kinect for Windowsセンサー以外の)特別なハードウェアなど使わずに、ソフトウェアのみで正確な顔の形状を計測できるようになる」と岩瀬さん。
操作も非常にシンプルだ。PCに一切触れることなく、鏡のようにKinect for Windowsセンサーの前に立つだけ。あらかじめ顔のベース形状を計測しておき、施術後に再度計測することで“その差”を、ビジュアル・数値化して表示してくれる。「キーボードやマウス操作、タッチやジャスチャー操作でさえも必要ない。ただKinect for Windowsセンサーに顔を近づけるだけでいい」(岩瀬さん)。
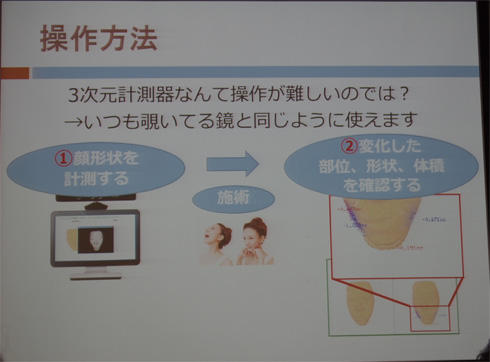 操作方法
操作方法岩瀬さんは今後の課題として、小型化、低価格化、高精度化の3つを挙げ、「デジタルサイネージへの組み込みや、クラウドを活用した高精度な分析などを実現していきたい」と説明。「早急にパートナーを見つけ、美容関連サービス事業者に向けてビジネスを展開したい」と話していた。
 デモの様子
デモの様子Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。