三位一体で災害現場マップを素早く作成、日立の原発ロボ:福島第一での実証試験も
日立製作所は、ネットワークロボット技術を活用した「調査モニタリングシステム」を開発した。VHF帯の無線通信で3台のモニタリングロボットを遠隔操作し、カメラ映像や各種センサーで得た情報を基に災害現場の状態マップを迅速に作成する。

日立製作所は2013年2月18日、ネットワークロボット技術を活用した「調査モニタリングシステム」を開発したと発表した。
本システムは、災害発生現場のような、人がすぐに立ち入ることのできない環境において、迅速に現場の状況を把握するためのもの。同社が取り組んでいる総務省の委託研究「ライフサポート型ロボット技術に関する研究開発」および「東日本大震災復興関連事業(平成23年度 第3次補正予算)」において開発・実証された、ロボットの無線による遠隔操作技術と空間台帳の作成技術の成果が生かされている。
| ロボット技術の最新動向: | |
|---|---|
| ⇒ | ロボット特集−MONOist |
空間台帳とは、ロボットが活動する空間の状態を定義するためのものである。例えば、床面の特性(形状、材質、傾斜、段差など)やエリア内の構造(棚、机、障害物など)、エリア間の構造(開口部、ドアなど)といった、対象となるエリアにひも付けられたさまざまな情報を管理する。
本システムでは、図面などの2次元マップの情報を基に、無線で3台のモニタリングロボット(調査用小型ロボットとマルチ機能搭載ロボットの2種類がある)を遠隔操作。ロボットに搭載されているカメラ映像や各種センサーで得た情報を、空間台帳にフィードバックし、災害現場の状態マップを迅速に作成する。3台のロボットを連携させることで、災害現場の状況を素早く、詳細に把握できる他、その後の復旧に向けた作業計画の作成やロボットによる復旧作業の実現などに活用できるという。

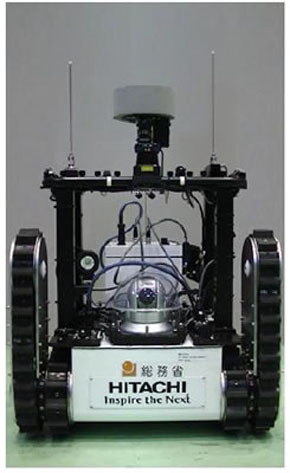 (左)調査用小型ロボット/(右)マルチ機能搭載ロボット
(左)調査用小型ロボット/(右)マルチ機能搭載ロボット| 項目 | 調査用小型ロボットの仕様 | マルチ機能搭載ロボットの仕様 |
|---|---|---|
| 重量 | 約45kg | 約100kg |
| 外形寸法 | 509×755×815mm | 611×879×815mm |
| 駆動方式 | クローラ型駆動方式 | クローラ型駆動方式 |
| 駆動時間 | 約3〜4時間(連続使用の場合) | 約3〜4時間(連続使用の場合) |
| 積載荷重 | 20kg以下 | 200kg以下 |
| 操作方法 | 無線 | 無線 |
| 表1 調査用小型ロボットとマルチ機能搭載ロボットの仕様 | ||
本システムでは、操作コンソールからの指示によるロボットの制御と、ロボットに搭載されたカメラ映像および各種センサー情報の受信に、電波伝搬特性が広範で安全性の高いVHF帯による無線通信が活用されている。さらに、ロボット自体が相互に無線の中継ポイントとして機能し、単体のロボットでは従来到達が困難だったエリア(無線が届きにくいエリア)でも調査モニタリングが行えるという。
 「操作コンソール」の外観。重量32kg。収納時のサイズは724×847×443mm。電源はAC 100V
「操作コンソール」の外観。重量32kg。収納時のサイズは724×847×443mm。電源はAC 100V3台のロボットは、それぞれの位置情報からロボットと障害物の位置関係を操作コンソールのマップ画面上に表示。操作時に障害物との干渉の可能性がある場合は、操作コンソールの画面上にアラートを表示する。
 操作コンソール(ロボット操作)の画面
操作コンソール(ロボット操作)の画面本システムで利用するモニタリングロボットの調達は、原子炉プラントの設計・建設などを手掛ける日立GEニュークリア・エナジーが、遠隔操作に必要な無線通信モジュールの開発は日立製作所 情報・通信システム社 ワイヤレスインフォ統括本部が担当している。今後、東京電力・福島第一原子力発電所 原子炉建屋での調査・復旧作業に活用できるよう、電力会社や関係機関などと協力し、現場での実証試験を実施するための提案を行い。同時に、運転操作員の訓練なども進めていくという。
 空間台帳の画面
空間台帳の画面ロボット/ロボット開発 コーナー

関連記事
 2本のアームが穴をあけ・切断し・モノをどかす――三菱重工業の原発ロボ「MHI−MEISTeR」
2本のアームが穴をあけ・切断し・モノをどかす――三菱重工業の原発ロボ「MHI−MEISTeR」
三菱重工業は、人が近づけないような災害・事故現場を自由に移動し、2本のロボットアームで点検/保守・補修などが行える遠隔作業ロボット「MHI−MEISTeR(マイスター)」を開発した。 「この足は飾りじゃない!?」――従来タイプよりも優れた原発向け「4足歩行ロボット」を東芝が開発
「この足は飾りじゃない!?」――従来タイプよりも優れた原発向け「4足歩行ロボット」を東芝が開発
東芝は、東京電力・福島第一原子力発電所の原子炉建屋内の調査・復旧作業を実施する「4足歩行ロボット」と、同ロボットと有線接続可能な「小型走行車」を開発した。 福島原発での活躍に期待、先行探査型ロボット「Sakura」と「災害対策用ロボットスーツHAL」
福島原発での活躍に期待、先行探査型ロボット「Sakura」と「災害対策用ロボットスーツHAL」
千葉工業大学および移動ロボット研究所からなるグループと、CYBERDYNEは、新エネルギー・産業技術総合開発機構(NEDO)が実施している「災害対応無人化システム研究開発プロジェクト」において、それぞれコンセプトの異なる災害対応ロボットを新たに開発した。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。