動作経済の原則1:身体部位の使用についての原則:実践! IE:方法改善の技術(6)(2/4 ページ)
2. 身体部位の使用についての原則
このグループは、身体の動きそのものについて述べていますので、最も応用の機会が多く、基本的なものが多く含まれています。ほかのグループ(「作業場所の配置についての原則」「設備・工具の設計についての原則」)のものは、「身体部位の使用についての原則」の応用や手段であることが多いといっても過言ではありません。したがって、この原則は、大変重要な原則ですので、その理解に努めていただきたいと思います。
〔原則1〕両手は対照的に動かすようにすること。
腕の運動は同一方向ではなく、反対に対照的であって、また同時に行うべきであるという原則です。この原則が上手に活用されると、次のようなメリットが得られます。
第1に、両手で同じことをやるわけですから、同時に2つのことを行うことができます。左手に物を保持して右手で加工するという場合に比べて、当然のことながら2倍近い生産性となるわけです。ただし、この場合に、目などの注意の要る動作を左右に離れたところで行うと、目を右に向け、目を右に向け、その動作が終了してから左に目を移すことになるため、交互に動作の釣り合い遅れが生じ、それだけで作業時間が短縮できなくなります。そのような注意を要する動作は、できるだけ体の前面の中央近くに間隔を詰めるように配置することが望ましいといえます。また、両手が対照的に同じことをやるためには、保持するということを止めなければなりません。この原則を実行するためには、取り付け・取り外しの容易な保持具などを準備する必要があります。
第2に、左右対称のために身体が左右に曲げられたり、ねじられたり、あるいはそういう動作が続くことがほとんどなくなりますので、身体の変形や内臓の圧迫などが少なくなり健康上も好ましい状態を確保することができます。
第3に、左右で2つの仕事をやっているわけですが、左右が同じ動きをするので脳の方は、ほとんど1つのことしか命令しないで済むことから、精神的疲労(頭の疲れ)が大きくはならないというのも、この原則の利点でもあります。関連した原則には、次のようなものもあります。
両手は、同時に動作を始め、また終わらなければならない。
両手は同時に、そのサーブリッグ(therblig:動作要素)を始め、あるいは終わるべきであるということですが、これは、「一方だけが動いていたのでは、他方がその間に待っていることになるので損である」ということを指摘した原則です。この原則の実施のために使われる道具としては、保持動作を止めるための組み立て治具や、片手を空かせるための足踏み装置(フットペタルなど)などがあります。
両手動作を行うに際して考えなければならないことは、異なった動作を同時に容易に行うのではなく、例えば、右手でハンマー、左手で部品をつかむとき、右手と左手の動作は同時に実施することは難しく、左手でつかんだ後、右手で打つ。このとき、右手がつかむ間、手待ちが生じることになります。保持、手待ちの生産的でない動作要素について削減するように工夫して、改善を進めていくようにしなければなりません。作業域や作業手順、作業配分などにも十分に留意して、両手の時間的なバランスを取るように検討を加えることが必要です。動作を対照的に進めることによって、保持、手待ち、釣り合いなどの時間的遅れを解消し、リズミカルな動作となり、自然に動作が進行していくことになります。このようなとらえ方から、「両手作業は同時に開始し、同時に終了する」ことによって、動作の経済性を高めることが可能となってきます。
〔原則2〕手を遊ばせたり、止めたりしてはならない。仮に、やむを得ない場合でも、両手共、同時に遊ばせたり、止めたりしてはならない。
この原則を一言で表現すれば、手は休憩時間以外は休めてはならないということです。これは、手を止めただけ仕事をしないわけですから、それだけ損であるということを述べたものです。これは、〔原則1〕と組み合わせて考えるべきで、そうすれば両手の完全稼働が得られます。この原則は、「動作経済の原則」の基本的な考え方ともいえます。すなわち、できるだけ価値のある作業の割合を高めるべきであるという考え方です。つまり、「稼働率向上」とは、稼げる働きの割合を高めるための改善活動です。
〔原則3〕両手の動作は、できるだけ最小の身体部位の動作に限定するようにすること。
作業は、身体の一部または全部を活用して運動を行います。その身体部位の活用の範囲が大きくなるにつれ、運動量は多くなり、その結果として労力が消費されて疲労を感じるようになってきます。そのため、できるだけ末端の身体部位(例えば、指の動作だけ)を活用して仕事をする方が動作速度も速く、運動量も少ない作業設計となります。
指、手、腕、足という順序に、できるだけ末端の身体部位を活用して作業が完了できるように、動作内容の最適化を考えることが大切です。また、動作距離が長くなればなるほど、使用する身体部位も広がり、運動量も増加することになります。また、時間的にも多くの時間を必要とし、エネルギーの消費量も多くなってきます。
同一の目的に対して行う動作であれば、最小の身体部位・最短の距離で行うことが最良です。部品類や工具類、計測器類については、できるだけ作業点に近いところに置くように工夫し、動作距離に関しても、直線的動作を阻害する障害物を除去し、できるだけ最短での動作が可能なように検討を加えていく必要があります。この際、目の動きを最小にするように配慮することも大切です。
これに関して、動作階級(Classes of Motion)という動作の分類が一般的に活用されます。これは、動作が及ぶ身体部位の範囲によって次の5階級に分けられています。
第1種 指の動作
第2種 指と手首の動作
第3種 指と手首と前腕の動作
第4種 指と手首と前腕と上腕の動作
第5種 指と手首と前腕と上腕と肩の動作
| 第1種 | 指の動作 |
|---|---|
| 第2種 | 指と手首の動作 |
| 第3種 | 指と手首と前腕の動作 |
| 第4種 | 指と手首と前腕と上腕の動作 |
| 第5種 | 指と手首と前腕と上腕と肩の動作 |
| 表2 動作階級(Classes of Motion) | |
作業点の運動範囲が次第に広がるにつれ、動作の所要時間が増してくることは明らかです。つまり、この原則を表すと、「両手の動作は、できるだけ最低次の動作階級(分類)に限定するようにする」ということになります。
この原則も特に重要な原則ですので、できるだけ小さい動作(最低次の動作階級での動作と最短距離の動作による作業完了)、つまり、「時間の短い動作で済ませよ」ということです。そのためには、加工するものでも、道具でも、加工されたものを放すところでも、すべて、できるだけ加工する場所に近づけておくことも必要となります。一般に、動作階級の低い動作ほど、所要時間、努力、労力のすべてが小さくて済むという傾向があります。
この原則の実行のための道具としては、物の取り置きの動作を小さくするための「図1 重力送り箱」や「図2 落とし送り装置」、手を伸ばさなくても品物が手元にくるようにするための「図3 コンベアー上のガイド」などがあります。重力送り箱(図1)は、図のように底が斜面になっている構造で、例えば、部品類などを下の口の端から取って使うにつれて順に上から滑って出てきて、手を伸ばさなくても、いつも同じ場所の近いところから品物が取れるようになっています。落とし送り装置(図2)は、出来上がった物に手を伸ばして箱に入れなくても近いところで放せば、箱の方へ落ちていってしまうようにする道具で、図に示すようなシューターを使うのが一般的です。
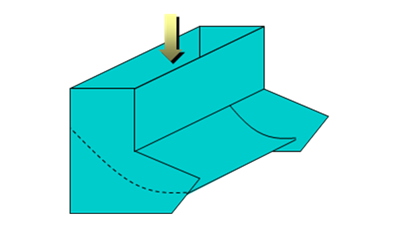 図1 重力送り箱
図1 重力送り箱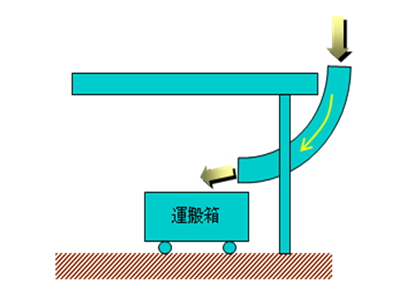 図2 落とし送り装置
図2 落とし送り装置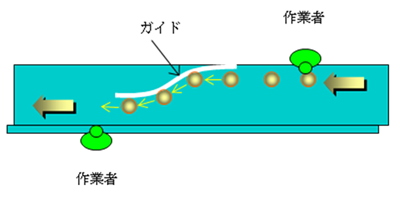 図3 コンベアー上のガイド
図3 コンベアー上のガイドCopyright © ITmedia, Inc. All Rights Reserved.
製造マネジメントの記事ランキング
- 「環境に良いことしかやらない」 MIRAI-LABOはなぜ独自製品を生み出せるのか
- マツダのモータースポーツの“聖地”は深川に、新たなブランド体験拠点を開設
- 地震、台風、有事の寸断――日本のサプライチェーン危機管理を変えるとき
- 自動車14社が参画、CLOとAI連携で“フィジカルインターネット”実現へ
- 三井不動産がデータセンターに6000億円超投資、物流の枠超え「産業デベロッパー」へ
- データはあるのになぜ使えない? 日本の製造業に必要な「データ活用基盤」
- 投資は多いのに稼げない、日本製造業の投資先を分析する
- 現場が求めるAIと、ITベンダーが提案するAIの「ズレ」
- 見えない仕事を可視化する「自己申告法」と間接業務を効率化する「帳票分析法」
- USBメモリだけではない、身近なUSB機器に潜むリスク
コーナーリンク





![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。