知的財産権情報を事業戦略策定に活用するには? 〜新規事業への参入を検討するための特許情報分析〜:自社事業を強化する!知財マネジメントの基礎知識(6)(3/6 ページ)
医療用ロボットに必要とされる技術要素別の出願状況を把握する
図1〜3で医療用ロボット全体の動向が分かりました。次に把握すべきは医療用ロボットで必要とされる技術にどのようなものがあるか、です。
今回はエンタメロボット社が具体的にどのような技術開発を行うか決まっていないため、出来合いの特許分類であるFターム3C007「マニプレータ・ロボット」をベースに技術項目を設定しました。もしも出来合いの特許分類では対応できない場合は、自ら技術項目を設定して特許公報を読んで分類展開する必要があります。
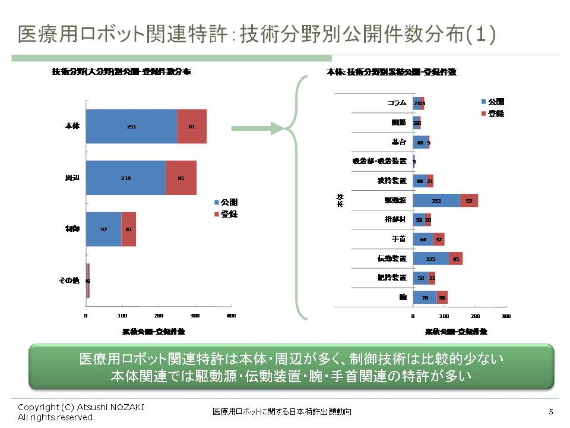 図4 医療用ロボットで重要な技術はどういった技術なの?(全体構成)
図4 医療用ロボットで重要な技術はどういった技術なの?(全体構成)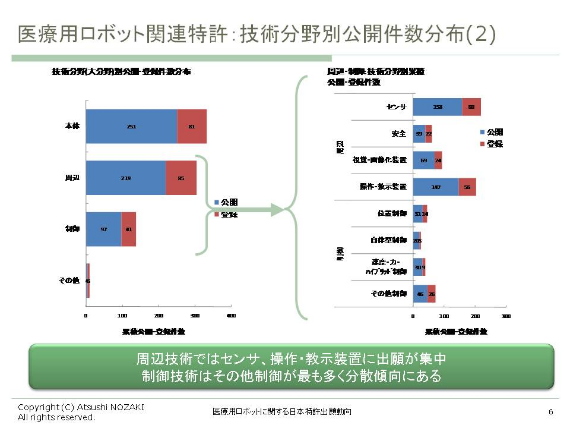 図5 医療用ロボットで重要な技術はどういった技術なの?(周辺・制御技術)
図5 医療用ロボットで重要な技術はどういった技術なの?(周辺・制御技術)図4〜5から全体として医療用ロボットの制御特許は少ないこと、技術項目別で見ると本体技術では駆動源や伝道装置関連が多く、周辺技術ではセンサや操作・教示装置の出願が多いことが分かります。
エンタメロボット社が得意とする関節技術についてはあまり件数が多くありません。件数が少ない理由として、医療用ロボットに必要とされる関節技術を手掛けている企業が少ないかもしれませんし、逆に医療用ロボットに特化した関節技術はあまりなく産業用ロボットの関節技術がそのまま転用されているのかもしません。具体的な内容、つまり医療用ロボットに必要とされる関節技術の詳細については、実際に特許公報を読んでみないと分かりません。
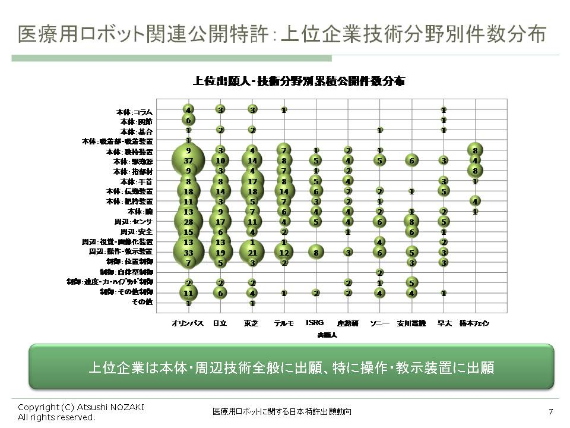 図6 上位の企業はどのような技術を押さえているの?
図6 上位の企業はどのような技術を押さえているの?それでは、上位企業はどの技術領域を押さえているのでしょうか? 図6を見ると特にオリンパス・日立製作所・東芝の3社は本体技術〜周辺技術まで幅広く出願していることが分かります。中でも特に周辺技術の操作・教示装置に出願が集中していることが見て取れます。
このことから、外科医などの手術担当者を補助するための操作・教示装置が医療用ロボットに必要とされる技術として重要性が高いのではないか? という仮説を打ち立てることができます。
またエンタメロボット社のコア技術である関節技術という観点で図6を見ると、関節技術にまとまった出願を行っているメーカーはオリンパスだけです。ほかのメーカーは関節技術について特許出願していないので、参入する余地が残されているかもしれません。
より深く知的財産管理を学ぶには?:「知財マネジメント」コーナーへ
知財マネジメントの基礎から応用、業界動向までを網羅した「知財マネジメント」コーナーでは、知財関連の情報を集約しています。併せてご覧ください。

Copyright © ITmedia, Inc. All Rights Reserved.
製造マネジメントの記事ランキング
- 140年企業はAIをどう組織改革に生かしたのか、組織スピード4倍の舞台裏
- SAP×オムロン×アビーム、現場から経営までリアルタイムにつなぐ工場像を提案
- 製造業が見直すサプライチェーン ものづくり白書で見る経済安全保障の実態
- ダイキン工業など、体感温度を5℃低減するベンチを共同開発し事業性を検証
- NTTドコモビジネスがIOWN活用の分散GPU環境を提供、25GBを2秒で転送
- パナソニックが「エオリア」メイン工場のモノづくりを公開 巨大な実験室も披露
- NECが3年で100億円狙うAnthropic協業の初ソリューション、AIが販売戦略立案
- シャープと鴻海精密工業、AIやエネルギーなどの新規事業創出に向け戦略的協業
- AIが持つ「光と影の側面」とは何か 日本オラクルが2027年度の事業戦略を公表
- NTTドコモやNECら5社、6Gに向けAIで複数周波数帯を最適制御する技術開発を推進
コーナーリンク


よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。