機構制御系のモデリング(その1) 〜機構と制御の基本について考える〜:1Dモデリングの勘所(36)(3/4 ページ)
制御の基本
次に、摩擦のない床面に静止している質量mの物体に対し、外力f(t)が作用している場合の質点の運動を考える(図7)。

この質点の運動方程式は、
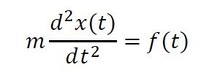 式7
式7となる。この運動方程式を初期条件(t=0で変位、速度が0)の下、ラプラス変換すると式8となる。
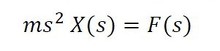 式8
式8これから、
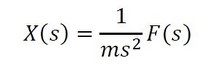 式9
式9となり、伝達関数は式10で定義できる。
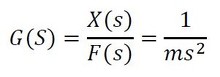 式10
式10次に、外力が作用したときの質点の応答について考える。外力の代表的なものとして図8に示す「ステップ入力」と「インパルス入力」を考える。

ステップ入力us(t)とは、ある時間(図8ではt=0)に、単位力が作用し、その後この状態が継続した状況である。一方、インパルス入力δ(t)とは、ある時間(図8ではt=0)に瞬間的に無限大の力が作用した状況である。δ(t)は「デルタ関数」といい、式11が成立する。
 式11
式11ステップ入力は物体をぶら下げた状態、インパルス入力は衝撃力を与えた状態で、いずれも日常的に経験する力の入力形態であり、ラプラス変換を用いることにより、これらの効果を表現、解析可能とする。通常の方法でこれらを模擬することは容易ではない。
図7について、力がステップ状に作用したときの質点の応答について考える。ラプラス変換の式を参考にすると、ステップ応答(ステップ入力に対する系の応答)は式12となる。
 式12
式12すなわち、ステップ入力を受けた静止した質点は、式12を時間で2回微分して、一定加速度1/mで運動することが分かる。
インパルス応答も同様にして式13で求まる。
 式13
式13すなわち、インパルス入力を受けた静止した質点は、式13を1回微分して、一定速度1/mで運動することが分かる。
このように、静止した質点にステップ入力、インパルス入力が作用すると、それぞれ一定加速度、一定速度で運動を開始して、次の外力が作用するまでこの運動を継続する。一般に、物体は何らかの外乱を受けるので、摩擦のない床面に静止している質点は制御の視点からいうと“安定ではない”ということになる。
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 使用中に発火、サーキュレーター10万台をリコール
- 図面AIに「動かせる3Dモデル」の生成機能、関節や可動域を自動認識
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 幾何公差の基準「データム」を理解しよう
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- Autodesk Fusionで設計した超小型衛星「PRELUDE」が軌道投入、初期運用へ







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。