
ROS 2を用いたロボットの実機とシミュレーションによるデジタルツイン連動の実践:ROSの進化とデジタルツインの可能性(後編)(4/5 ページ)
4.Isaac Sim上のLiDARによるロボットの停止同期
次に、デジタルツインのシミュレーションからのフィードバックとしてIsaac Sim上のTurtlebot3にLiDAR(Light Detection and Ranging、ライダー)を設定し、障害物に近づいた時にロボットを停止させる挙動を作成する。
4.1. LiDARの設定
(1)ROS2 Bridgeを有効にし「2.2.3 Isaac SimとROSの連携」で作成したTurtlebot3のUSDファイルを開く。
(2)オブジェクト一覧の「Turtlebot3_burger」下の「base_scan」を選択し、左上のメニューから“Create>Isaac>Sensors>Lidar>Rotating”を選択し、“Lidar”というオブジェクトを追加する(図20)。
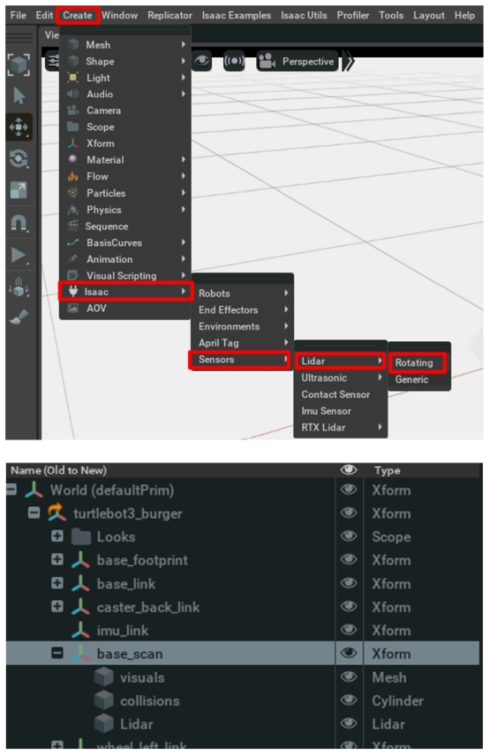 図20 オブジェクトの“Lidar”を追加する
図20 オブジェクトの“Lidar”を追加する(3)Lidarの「Property」群の「Raw USD Properties」は下図のようにパラメータを設定する(図21)。
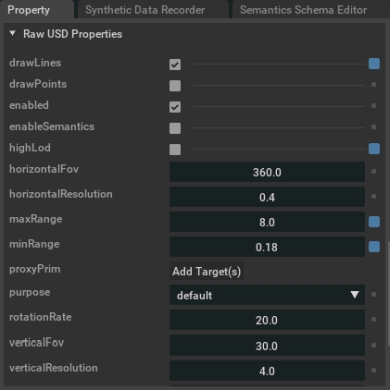 図21 「Raw USD Properties」のパラメータを設定する
図21 「Raw USD Properties」のパラメータを設定する(4)ROS 2トピックとして出力するため、「Action Graph」を設定する。
「Action Graph」は「2.2.3 Isaac SimとROSの連携」の(2)で作成したものにノードを追加して使用する。
既存Action Graphは図22のように開くことができる
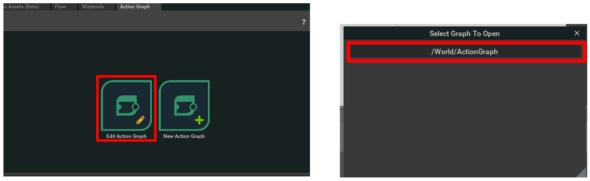 図22 既存のAction Graphの開き方
図22 既存のAction Graphの開き方- 追加するノード(図23)
- Isaac Read Lidar Beams Node:Isaac SimのLidarパラメータを設定するノード
- Isaac Read Simulation Time:Isaac Sim上の時間を出力ノード
- ROS2 Publish Laser Scan:センサーをROSトピックとして出力するノード

(5)各ノード設定の「Property」を図24のように変更する。
- ROS2 Publish Laser Scan「Inputs」-「topicName」:“scan_sim”と入力
- Isaac Read Lidar Beams Node「Relationships」-「inputs:lidarPrim」:Lidarのオブジェクトを指定
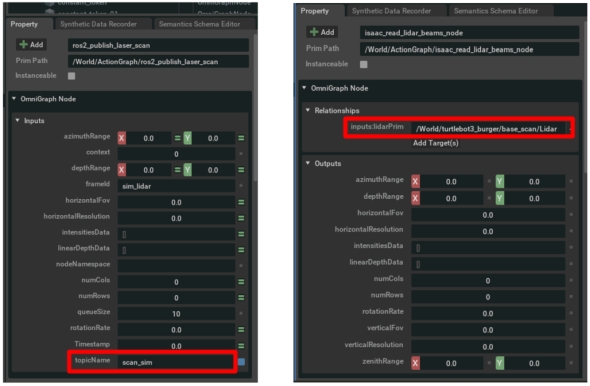 図24 各ノード設定の「Property」を変更する
図24 各ノード設定の「Property」を変更する別のターミナルでリスト10のように“ros2 topic list”と入力すると、トピック一覧として“/scan_sim”が表示されることが確認できる。
$ ros2 topic list /cmd_vel /parameter_events /rosout /scan_sim
USDファイルを保存してIsaac Simを閉じる。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。