重機の遠隔操作システムと自動運転機能の現場運用方法を検証:ロボット開発ニュース
安藤ハザマとコベルコ建機は共同で、重機の遠隔操作システムと自動運転機能を現場検証し、作業現場での安全運用方法を検証した。現場から離れたコックピットから、現場の重機2台を遠隔操作と自動運転で切り替えながら同時稼働させた。
» 2024年01月05日 14時00分 公開
[MONOist]
安藤ハザマは2023年12月13日、コベルコ建機と共同で、重機の遠隔操作システムと自動運転機能の現場検証を実施したと発表した。重機2台を稼働させ、遠隔操作と自動運転による走行移動や土砂積み込み作業を安全に完了した。同検証は、国土交通省が募集した「建設機械施工の自動化・遠隔化技術に係る現場検証」の一環となる。
今回の検証では、重機の遠隔操作システムと稼働データを用いた現場改善ソリューション「K-DIVE」を活用。K-DIVEに開発中の自動運転機能を搭載し、現場から離れたコックピットから、現場の重機2台を遠隔操作と自動運転で切り替えながら同時稼働させた。
 遠隔操作システムと自動運転技術の複合検証イメージ 出所:安藤ハザマ
遠隔操作システムと自動運転技術の複合検証イメージ 出所:安藤ハザマ現場での遠隔や自動運転による安全な施工のため、エリアを重機のみの無人エリア、重機と人の混在エリア、人がいる有人エリアと定義した。混在エリアで人と重機が接触するリスクがある場合には、K-DIVEの非常停止機能を使うルールを策定した。
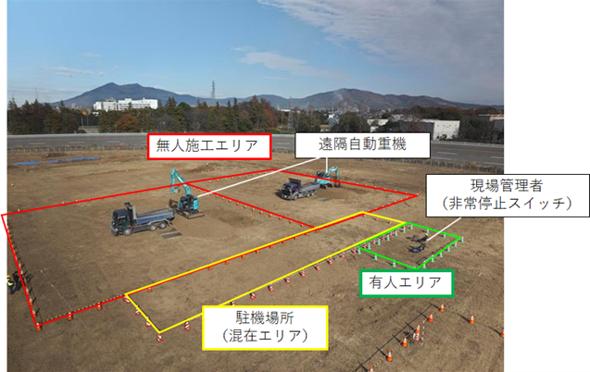 リスクアセスメントに基づいたエリア区分 出所:安藤ハザマ
リスクアセスメントに基づいたエリア区分 出所:安藤ハザマ
検証結果からK-DIVEの有用性を示したほか、重機1台を自動運転で動かす間にコックピットから別の重機に対して自動運転する作業を遠隔操作で設定するなど、さまざまな現場での活用が示唆された。今後は、K-DIVEへの自動運転技術の実装に向けて、検証を進めるとしている。
関連記事
 “脱力”でロボットは剛柔自在? 人機一体が共同開発技術を一堂に
“脱力”でロボットは剛柔自在? 人機一体が共同開発技術を一堂に
人機一体は、「2023国際ロボット展」において、建設現場などでの重作業や危険作業を遠隔操縦のロボットによって代替する「人機プラットフォーム」で開発中の技術やシステムを披露した。 1人のオペレーターで複数の配送ロボットを遠隔操作する実証実験を開始
1人のオペレーターで複数の配送ロボットを遠隔操作する実証実験を開始
京セラコミュニケーションシステムとNEDOは、1人のオペレーターで複数の自動配送ロボットの遠隔監視、操作を行える配送サービスの実証実験を開始した。 三菱電機、スマホで遠隔操作できるロボットやプラスチックリサイクル技術を披露
三菱電機、スマホで遠隔操作できるロボットやプラスチックリサイクル技術を披露
三菱電機は、「CEATEC 2023」において、力の入れ具合などをビジュアルでフィードバックを受けながら遠隔操作できるロボットソリューションや、プラスチックの効率的な分別技術など、さまざまな社会課題解決につながる先進技術を紹介した。 建機自動操縦標準機の開発プロジェクトで、他社システム連携の実証実験に成功
建機自動操縦標準機の開発プロジェクトで、他社システム連携の実証実験に成功
JIG-SAWは、ロードローラ向け自動操縦などの機能を実用搭載する業界標準機開発プロジェクトにおいて、大成建設の自動建機協調制御システム「T-iCraft」と連携した協調制御の実証実験に成功した。 IoTなどの技術を活用した建設機械の稼働状況を可視化するシステムを導入
IoTなどの技術を活用した建設機械の稼働状況を可視化するシステムを導入
NECソリューションイノベータは、IoTやLPWAネットワークなどの技術を活用して全国の建設機械の稼働状況を可視化するシステムを、鹿島道路へ提供した。システムの地図上で建設機械の位置、稼働状況を視覚的に表示する。 コマツの自律運転建機、AIは「適材適所」で採用
コマツの自律運転建機、AIは「適材適所」で採用
コマツは、「CEATEC JAPAN 2018」において、建設現場の無人化を可能にする自律運転建機を展示した。「コマツIoTセンタ東京」で実証実験を進めているもので、2021年ごろの商品化を目指している。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special ContentsPR
特別協賛PR
スポンサーからのお知らせPR
Special ContentsPR
Pickup ContentsPR
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
Special SitePR
コーナーリンク



あなたにおすすめの記事PR
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。