オーディオ信号でステッピングモーターを回す【後編】:注目デバイスで組み込み開発をアップグレード(6)(1/2 ページ)
注目デバイスの活用で組み込み開発の幅を広げることが狙いの本連載。第6回は、オーディオ信号でステッピングモーターを回すための回路やデバイスを紹介した前回に引き続き、オーディオ信号で実際にステッピングモーターを回してみる。
はじめに
オーディオ信号でステッピングモーターを回すための回路やデバイスについて紹介した前編に引き続き、今回の後編ではオーディオ信号で実際にステッピングモーターを回してみましょう。この記事をより理解を深めていただくために、以下に挙げる筆者のMONOistの過去記事を参照することをお薦めします。
ステッピングモーターの回し方
今回の実験に使うステッピングモーターは6つの電極を持つユニポーラ型です(図1)。まずは一定方向に回転させてみましょう。ここで用いるステッピングモーターは、先に挙げた記事「ステッピングモーターの制御」に掲載したものを用いました。
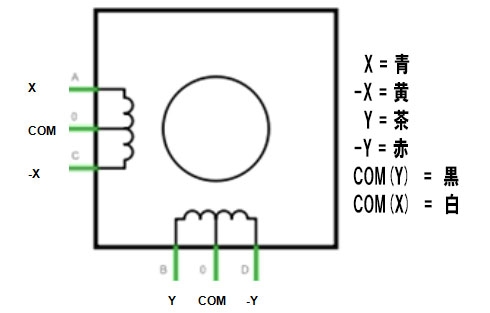 図1 ユニポーラ型ステッピングモーター内部の電気的な接続
図1 ユニポーラ型ステッピングモーター内部の電気的な接続Xにマイナス、COM(X)をプラスとして電流を流します。電圧は6Vとします。これらの電流を停止した後、Yにマイナス、COM(Y)をプラスとして電流を流します。いったん電流を停止した後−Xにマイナス、COM(X)をプラスとして電流を流します。その電流を止めた後、次は−Yにマイナス、COM(Y)をプラスとして電流を流します。これらの4ステップが、ひとかたまりのシーケンスとなります。モーターを逆回転させる場合は先ほどとは逆のシーケンスとなります。COM(X)とCOM(Y)がともにプラス電源に常時接続されているとすれば、−Y、−X、Y、Xの順にマイナス電源に接続します。
信号の与え方
回転のシーケンスの最初のステップ、ステッピングモーターのXにマイナス、COM(X)をプラスとして電流を流すことを考えてみましょう。前編で紹介した実験回路の構成(図2)ではCOM(X)とCOM(Y)ともプラス電源に接続されています。このことを前提にして、DTMFデコーダーのq1が1で、それ以外のq2、q3、q4が0の場合、Xがマイナスとなります。これで回転シーケンスの最初のステップの条件が成立します。

ここまでに至る回路に関わる説明をしておきましょう。DTMFデコーダーのq1が1になると、すなわちq1からは5Vが出力されることとなります。もしDTMFデコーダーのドライブ力がステッピングモーターを駆動するレベルの電流を流せる能力があればそのままステッピングモーターに直結すればよいのですが、DTMFデコーダーの電流ドライブ力は数mAしかありません(ただし、電流の極性が逆になることに注意してください)。
しかしステッピングモーターを駆動するためにはコイルに数百mA〜数Aの電流を流す必要があります。そこに助っ人として登場するのがトランジスタです。トランジスタは少ない電流で、それよりも大きな電流をドライブするデバイスです。もちろんトランジスタにはこれ以外にもさまざまな応用があるのですが、今回は少ない電流でより多くの電流をドライブできるデバイスとして用います。DTMFデコーダーのq1が5Vとなると、470Ωの抵抗を介してトランジスタQ1のベースに電圧が印加されます。
すると、あらあら不思議、トランジスタQ1のコレクタからエミッタ間が導通します。これでステッピングモーターのCOM(X)〜X間で電流が流れます。これでXサイドのコイルに電流が流れてステッピングモーターの回転子がステップを1つ刻みます。
DTMF音源ファイルの取得
制御するオーディオ信号であるDTMFの作り方ですが、最も簡単な方法は、DTMFのフリーのサンプルオーディオファイルを探してくることでしょう。例えば、Wikipediaなどにも掲載されています。
ここからはどのようなDTMF音源が必要なのかを見ていきましょう。DTMFデコーダーの出力のq1、q2、q3、q4どれか1つだけが1になるシンボルは1、2、4、8となります。シンボルとDTMFの周波数の組み合わせについては前編の表を参照してください。これらの4ファイルを取りあえずPCのローカルディスクのどこかに保存しておきましょう。ちなみに筆者の場合は以下の4つのファイルを使用しています。保存したフォルダは「ダウンロード」でファイル名は以下のようになります(リスト1)。音声ファイルの形式はいずれもMP3です。
DTMF-1.mp3 DTMF-2.mp3 DTMF-4.mp3 DTMF-8.mp3
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。