バイポーラ型ステッピングモーターの制御:Arduinoで学ぶ基礎からのモーター制御(8)(4/5 ページ)
» 2016年07月11日 07時00分 公開
[今岡通博,MONOist]
次の図を見てください。
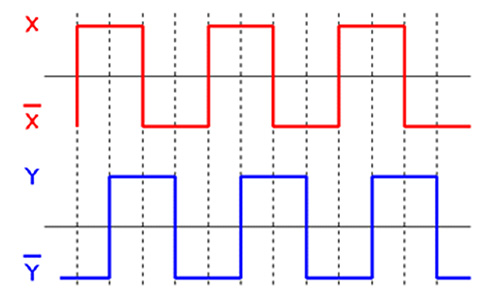
赤の波形がAコイル、青の波形がBコイルとします。波形が山の部分でコイルのA-1からA-2に電流が流れ、波形の谷の部分ではA-2からA-1に電流が流れるとします。Bコイルも同様です。この図を参考に、AコイルとBコイルの山谷が交互に来るよう、プログラムを書き換えてみました。
void setup() {
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
}
void loop() {
digitalWrite(3,LOW);
digitalWrite(2, HIGH);
delay(5);
digitalWrite(5,LOW);
digitalWrite(4, HIGH);
delay(5);
digitalWrite(2, LOW);
digitalWrite(3, HIGH);
delay(5);
digitalWrite(4, LOW);
digitalWrite(5,HIGH);
delay(5);
}
List2
いかがですか。よりスムーズに回転するようになったと思います。
ただ、このプログラムではモーターが回転し続けるだけなので、筆者のように直動装置を駆動している場合は、移動するテーブルが端まで行きつくと強制的にモーターを停止させて、モーターについているノブを回してまた元の位置まで戻してやる必要があります。
これでは何度も実験したり、調整する場合などは大変です。そこでスイッチを1つ追加して、スイッチを押しているときは逆回転、またスイッチを押していないときには正回転するようにプログラムを改造してみます。スイッチはGPIOの6番ピンに付けることにします。スイッチが閉じるとGPIOの6番がグランドに落ちるように配線します。
関連記事
 ステッピングモーターの制御
ステッピングモーターの制御
前回までは“マブチモーター”に代表される「直流ブラシ付きモーター」を、マイコン(Arduino)で制御する方法を紹介してきました。今回からは「ステッピングモーター」の制御に取り組みます。 PWMを使ったサーボモーターの制御
PWMを使ったサーボモーターの制御
ラジコンカーのステアリングやロボットの関節などに用いられ、角度を指定して動かす機能を持つのが「サーボモーター」です。今回はArduinoからこのサーボモーターの制御をPWMを用いて行う手法を紹介します。 PWMでマブチモーターを制御する
PWMでマブチモーターを制御する
「マブチモーター」でもおなじみ「直流ブラシ付きモーター」は安価で入手性もよいモーターですが、マイコンからの制御を考えると一工夫必要になります。今回は「PWM」を使った回転制御を紹介します。 困ったら読みたいマブチモーター制御のTips
困ったら読みたいマブチモーター制御のTips
この連載ではここ数回、「マブチモーター」に代表される直流ブラシ付きモーターをマイコンから制御する話をしていますが、今回は困ったときに読みたい、知っておくと便利なTipsを幾つか紹介したいと思います。 マブチモーターのノイズ対策
マブチモーターのノイズ対策
「マブチモーター」に代表される直流ブラシ付きモーターは安価で入手性も良好ですが、Arduinoなどと組み合わせる際には発生するノイズが問題となることがあります。そこで今回は、「直流ブラシ付きモーターのノイズ対策」について解説します。 マブチモーターをArduinoで制御する
マブチモーターをArduinoで制御する
「マブチモーター」でもおなじみ「直流ブラシ付きモーター」は安価で入手性もよいモーターです。これをArduinoで制御するとしたら、何を理解して何を用意して、どんなプログラミンが必要でしょうか。実験します。
Copyright © ITmedia, Inc. All Rights Reserved.
Special ContentsPR
特別協賛PR
スポンサーからのお知らせPR
Special ContentsPR
Pickup ContentsPR
組み込み開発の記事ランキング
- 周波数を使って熱電対センサーの測定値を安価な電線でより遠くまで伝送する
- フィジカルAIに挑む日の丸連合、「Noetra」とは何か
- 新画素構造で20%以上高精細化した1/2型モバイル用CMOSイメージセンサー
- 数μmの傷を手で触って判別できる触覚増幅デバイス、デジタル化も視野に
- 1年でAfter AIの組織に生まれ変わったソラコム、「トークン資本」の安全な器へ
- フィジカルAI搭載ロボットがモノポリーを実演、1台のPCにモーション制御も統合
- 村田製作所が製品データ自動取得サービスの対象範囲を24倍に大幅拡大
- 陸上自衛隊から四足歩行型警備ロボットシステムの導入検証業務を受託
- 日本の「完璧主義」から脱却し中国ヒューマノイドにどう立ち向かうか
- 直径33mmの超低消費電力IoT機器向けプロトタイピングプラットフォームを発売
Special SitePR
コーナーリンク
よく読まれている編集記者コラム



あなたにおすすめの記事PR
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。