困ったら読みたいマブチモーター制御のTips:Arduinoで学ぶ基礎からのモーター制御(4)(4/4 ページ)
 Hブリッジ回路を含む回路
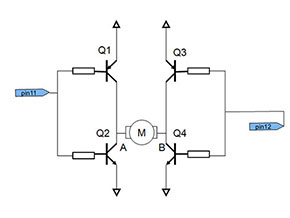
Hブリッジ回路を含む回路それでは動作を見ていきましょう。
まずは図6のpin11には1の入力、pin12には0の入力が加わった際の動作です。この場合Q1のPNP型のトランジスタのベースには1となりますので、Q1のエミッターとコレクター間は導通しません。一方Q2のNPN型トランジスタのベースは1となりますので、Q2のコレクターとエミッター間は導通します。よってモーターのA端子はGNDにつながります。
今度はトランジスタQ3とQ4の動作を見ていきましょう。Q3のPNP型のトランジスタのベースには0が入力されますので、エミッターとコレクターが導通し、モーターのB端子にはプラスの電圧が加わります。またQ4のベースには0が入力されますが、このトランジスタはNPN型のトランジスタですので、コレクターとエミッター間は導通しません。この場合モーターのA端子にはマイナス、B端子にはプラスの電源がつながったことになります。仮にこの時の回転方向を正転とします。
今度は先ほどとは逆に、pin11に0、pin12には1が入力された場合の動作についてみていきましょう。
Q1のベースは0が入力されます。Q1はPNP型のトランジスタですのでエミッターとコレクター間が導通しプラスの電源がモーターのA端子とつながります。Q2のベースにも0が入力されますが、Q2はNPN型のトランジスタですから、コレクターとエミッター間は導通しません。
Q3とQ4はどうでしょう。それぞれのベースには1が入力されますので、Q4のNPN型のトランジスタのコレクターとエミッター間のみ導通します。よってモーターのB端子には電源のマイナスがつながります。よってモーターのA端子にはプラスそしてB端子にはマイナスの電源がつながり、先ほどとは逆となります。先ほどが正転としたのに対して今度はモーターはその逆回転します。
pin11とpin12が共に1が入力された場合はどうでしょう。その場合はNPN型トランジスタのQ2とQ4のコレクターとエミッター間がつながります。モーターのAとBの端子には電源のマイナスがつながることになります。この場合モーターのAとBには電位差が発生しませんので、モーターには電流が流れません。よってモーターは停止した状態になります。
逆にpin11とpin12がともに0が入力された場合はどうでしょう。その場合はPNP型トランジスタのQ1とQ3のコレクターとエミッター間がつながります。モーターのAとBの端子には電源のプラスがつながることになります。この場合モーターのAとBには電位差が発生しませんので、モーターには電流が流れません。先ほどと同様にモーターは停止状態になります。
以上のpin11とpin12の入力に対するモーターの動作をまとめると、下表のようになります。
| Pin11の入力 | Pin12の入力 | Aの極性 | Bの極性 | 回転方向 |
|---|---|---|---|---|
| 1 | 0 | マイナス | プラス | 正転 |
| 0 | 1 | プラス | マイナス | 逆転 |
| 0 | 0 | プラス | プラス | 停止 |
| 1 | 1 | マイナス | マイナス | 停止 |
おわりに
 東芝製 DCモーター用フルブリッジドライバ(正逆切り替えドライバ)
東芝製 DCモーター用フルブリッジドライバ(正逆切り替えドライバ)今回はマイコンから直流ブラシ付きモーターを制御するためのさまざまなTipsを紹介しました。特にモーターの正転・逆転回路は写真のような市販されている専用デバイスを使うのが一般的ですが、ここではあえてトランジスタで回路を組んでみました。
皆さんの電子回路に対する理解が深まることを期待します。次回はモーターのパワーを制御するPWM(パルス幅変調)について紹介します。お楽しみに。(次回へ続く)
関連記事
 マブチモーターのノイズ対策
マブチモーターのノイズ対策
「マブチモーター」に代表される直流ブラシ付きモーターは安価で入手性も良好ですが、Arduinoなどと組み合わせる際には発生するノイズが問題となることがあります。そこで今回は、「直流ブラシ付きモーターのノイズ対策」について解説します。 マブチモーターをArduinoで制御する
マブチモーターをArduinoで制御する
「マブチモーター」でもおなじみ「直流ブラシ付きモーター」は安価で入手性もよいモーターです。これをArduinoで制御するとしたら、何を理解して何を用意して、どんなプログラミンが必要でしょうか。実験します。 「マイコンによるモーター制御」を学ぶ前に知っておくべきこと
「マイコンによるモーター制御」を学ぶ前に知っておくべきこと
「動くモノ」の制御ができると手を動かした実感がわくものです。この連載では、マイコンを用いたモーター制御の基礎を学んでいきます。 モータ制御に欠かせない技術“PWM”って何?
モータ制御に欠かせない技術“PWM”って何?
マイコンから電圧を変化させてモータの速度を変えるのは非常に効率が悪い。そこで周期的なパルス信号を発生させるPWMの登場となる。 お手軽モノづくり体験――「あったらいいな」をArduinoでカタチにしてみよう!
お手軽モノづくり体験――「あったらいいな」をArduinoでカタチにしてみよう!
「こんなモノがあったらいいのに……」をArduino(アルドゥイーノ)で実現。電子工作初心者や回路の知識のない人だって大丈夫。筆者と一緒に、頭の中のアイデアをカタチにし、モノづくりの喜びや難しさを体験・体感してみよう! 第1回では、開発環境の準備と電子工作の“Hello World”こと、「エルチカ」に挑戦するぞ!!
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。