発売前の「教育版レゴ マインドストーム EV3」を一足お先に触ってきた!:先行体験会リポート(3/4 ページ)
» 2013年05月01日 10時00分 公開
[八木沢篤,MONOist]
さらに難易度アップ!! 高校、大学・企業向けの体験課題にチャレンジ
問題解決力を養う
続いて、高校向けの体験課題に挑戦しました。ここでは、課題の分析、問題解決方法の検討、実践を学びます。与えられた課題は、
- 決められた距離(120cm)を走行して止まる
- なるべく速く走行する
です。ロボットの形状を変えずに、どうやって解決するかを問うものです。正解は1つではありません。タイマーを使う、計算結果を使う、計算しながら走るなど、さまざまです。これを自分なりに考え、実現します。先ほど実践した中学生向けのものとは異なり、数学(算数)の知識も必要になってきます。
結果は、このような感じになりました。
決められた距離を正確に走る。タイヤの円周を求めて、何回転させれば着くか……。「あれ、円周ってどうやって求めるんだっけ」と、しばし思考が停止した筆者。これはヤバイぞ
自動追従システムを開発
最後の大学・企業向けの体験課題ですが、この段階ではチーム開発、システム開発プロセス、プロトタイプ作成を学びます。今回は、ライントレースをしながら、前を走るロボットにぶつからないように走行させる「自動追従システム」が課せられました。イメージは、新エネルギー・産業技術総合開発機構(NEDO)が発表した大型トラックによる自動運転・隊列走行技術です(関連記事)。
参考 こんなイメージにしたい!(提供:MONOist「オートモーティブ」フォーラム)
ここでは、前のロボットを認識するために、「超音波センサー」を利用します。教育版 EV3の前方下部に超音波センサーを配置し、入力ポート[4]に接続しました。


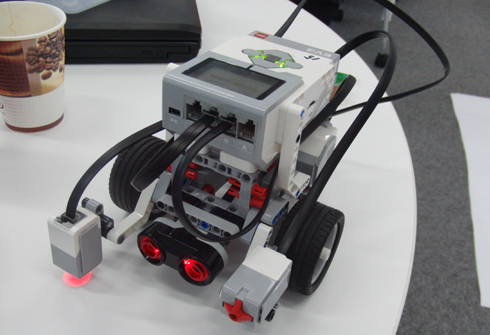 超音波センサーを追加した教育版 EV3
超音波センサーを追加した教育版 EV3それでは、調整中の動きと、全員参加による自動追従システムの様子をご覧いただきましょう。
自動追従(調整中)。最後に走行しているのが筆者のロボットだ。前のロボットとの距離が迫ったら、少しだけ下がる仕様にしたのでカクカクとした動きに見える
自動追従(完成)。後ろから3台目が筆者のロボット。前のロボットをあおっているようにも見えるが、イメージ通りの動きだ! ※注:参加者が手に持っている飲み物は気にしないこと
Copyright © ITmedia, Inc. All Rights Reserved.
Special ContentsPR
特別協賛PR
スポンサーからのお知らせPR
Special ContentsPR
Pickup ContentsPR
組み込み開発の記事ランキング
- 日本再起の旗印となるか、国産マルチモーダルAI基盤「FRONTia」が始動
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- TSMCの“Beyond 2nm”技術の現在地、「A14」で第2世代ナノシートトランジスタへ
- 大腸がんを低侵襲に治療できるESD、オリンパスが内視鏡ロボット技術で容易に
- 既設光ファイバーで450Tbps伝送に成功、周波数帯域幅を従来の4倍以上に拡大
- イチから全部作ってみよう(34)マルチプログラミングとトランザクション
- NVIDIAフアン氏が神田に現る――日本製造業巻き込む「ジャパンAI協業」祭り
- NVIDIAが「Jetson Thor」に新モジュール追加、高騰するメモリの使用量削減技術も
- インテグレーション地獄からの脱却:構造問題と「インテグレーター人権宣言」
- AIで脆弱性影響調査を自動化、管理工数を約70%削減
Special SitePR
コーナーリンク



あなたにおすすめの記事PR
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。