京大発、未来型ビークル「Permoveh」――全方向駆動車輪で真横も斜めも回転も自在!!:産業分野への応用も
京都大学大学院 工学研究科の小森雅晴准教授は、全方向駆動車輪を搭載した未来型の乗り物「Permoveh(Personal Mobile Vehicle)」を開発。前後・左右・斜め・回転が可能で、周囲の人と調和して移動できるパーソナルモビリティとしての利用に期待を寄せる。
高齢者や足の不自由な方にとって、車イスや電動移動装置は生活に欠かせないものである。しかし、家や病院の室内、オフィス内、街中などで利用する場合、こうした従来の手段では移動性が低く、真横に移動したり、切り返しなしに斜めに移動することはできない。日常生活において、切り返しスペースが確保できないような狭い室内や混雑したエレベーター内のような空間で、移動に苦労されるケースが多々あるという。
こうした課題に対し、京都大学大学院 工学研究科の小森雅晴准教授(機械理工学専攻)は、真横にも、どの方向にも移動できる未来型の乗り物「Permoveh(Personal Mobile Vehicle)」を開発した(2012年3月22日発表)。Permovehであれば、人と同じようにどの方向にも移動でき、向きを変えることができることから、周囲の人と調和して移動できるパーソナルモビリティとして利用することが可能だという。
 図1 小森雅晴准教授が開発した「Permoveh(Personal Mobile Vehicle)」
図1 小森雅晴准教授が開発した「Permoveh(Personal Mobile Vehicle)」Permovehには、前後・左右・斜めのどの方向にも移動可能な「全方向駆動車輪」が4つ付いている。これにより、前後だけでなく、真横にも、斜めにも移動できる他、その場で回転して向きを変えることも可能になる(補足)。例えば、狭い病室でベッドのすぐそばに移動したい場合など、切り返しなしに寄せることができる。
 図2 全方向駆動車輪のアップ
図2 全方向駆動車輪のアップまた、この技術は工場や倉庫で用いる移動車両や搬送車、コンベアなどに応用可能だとする。
Permovehであれば切り返し動作・切り返しスペースが不要となり、最小限の空間で任意の方向へ移動できる。そのため、作業時間の短縮と空いたスペースの有効利用に期待できるという。さらに、全方向駆動車輪をコンベアと組み合わせて利用することで、物品の選別作業にも効果を発揮するとしている。
以下に前後・左右・斜め移動時の全方向駆動車輪の動作イメージを示す。
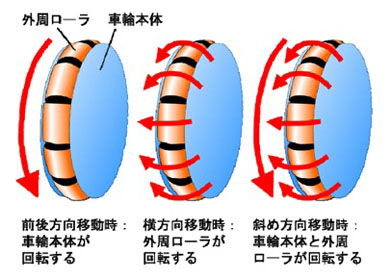 図3 全方向駆動車輪の動作イメージ 車輪本体と車輪の外周部に配置された外周ローラをそれぞれ別々に駆動し回転させることが可能な全方向駆動車輪を開発。車輪本体が回転すると前後方向に、外周ローラが回転すると横方向に、車輪本体と外周ローラがともに回転すると斜め方向に移動できる。また、その場で回転して向きを変えることも可能だ
図3 全方向駆動車輪の動作イメージ 車輪本体と車輪の外周部に配置された外周ローラをそれぞれ別々に駆動し回転させることが可能な全方向駆動車輪を開発。車輪本体が回転すると前後方向に、外周ローラが回転すると横方向に、車輪本体と外周ローラがともに回転すると斜め方向に移動できる。また、その場で回転して向きを変えることも可能だ(※出典:プレスリリースより)
関連記事
 介護・医療をアシスト! トヨタがパートナーロボット4種を開発――2013年以降の実用化へ
介護・医療をアシスト! トヨタがパートナーロボット4種を開発――2013年以降の実用化へ
 大和ハウス工業、「ロボットスーツHAL 福祉用」の装着体験キャンペーンを実施
大和ハウス工業、「ロボットスーツHAL 福祉用」の装着体験キャンペーンを実施
 ZMP、9軸モーションセンサー「e-nuvo IMU-Z」の自動車研究・開発向け計測シリーズを発売
ZMP、9軸モーションセンサー「e-nuvo IMU-Z」の自動車研究・開発向け計測シリーズを発売
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。