自然な動きが可能になるリハビリ用ロボットの基盤技術を開発:医療機器ニュース
電気通信大学は、リハビリテーションロボットのアシスト中の機械的な透明性を高める革新的な手法を開発した。患者はリハビリ中にロボットの機械的特性に制約されることなく、自然な動作ができる。
電気通信大学は2024年5月13日、リハビリテーションロボットのアシスト中の機械的な透明性を高める革新的な手法を開発したと発表した。
機械的な透明性とは、リハビリテーションロボットなどを装着した人の動作にロボットが追従した際、ロボットの存在を装着者が力覚的に感じない状態を指す。
今回の研究では、肩関節リハビリテーションロボットのアシスト中の機械的な透明性を向上させる技術と、透明性を検証するベンチマーク試験を開発した。

ロボットの関節駆動に、独自開発した融合型ハイブリッドリニアアクチュエーターを搭載することで、外部からのさまざまな動きに強い、精密なトルク制御が可能となった。トルクの制御性を評価したところ、ロボット装着者(患者)の動きに対してロボットが迅速に応答し、適切なトルクでアシストできることが実証された。
 試験機の透明性の評価実験結果。トルクの生成能力は、P-PとP-Eの2つの制御方法で比較した。a:Slow条件(0.31rad/秒)における関節トルク。b:Fast条件(0.65rad/秒)における関節トルク。c:トルクの平均二条平方根誤差の比較[クリックで拡大] 出所:電気通信大学
試験機の透明性の評価実験結果。トルクの生成能力は、P-PとP-Eの2つの制御方法で比較した。a:Slow条件(0.31rad/秒)における関節トルク。b:Fast条件(0.65rad/秒)における関節トルク。c:トルクの平均二条平方根誤差の比較[クリックで拡大] 出所:電気通信大学従来のロボットでは、ロボット固有の特性により、患者の自由を制約する相互作用力が患者とロボット間に発生する。また従来の透明性コンセプトは、相互作用をゼロに保つことで患者は自由に動作できるが、アシスト力は発生しない。
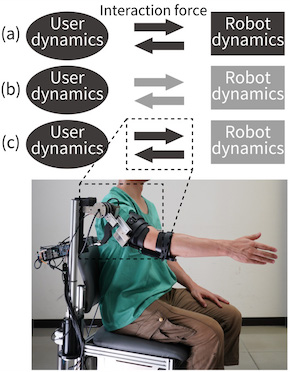 アシストロボットにおける「透明性」コンセプト。a:従来のロボット。b:従来の透明性コンセプト。c:提案されたアシスト中の透明性コンセプト 出所:電気通信大学
アシストロボットにおける「透明性」コンセプト。a:従来のロボット。b:従来の透明性コンセプト。c:提案されたアシスト中の透明性コンセプト 出所:電気通信大学今回提案した透明性のコンセプトは、ロボットと患者の間で相互作用力が発生するアシスト中に、患者の動きにロボットが追従しつつもロボット固有の特性を適切に打ち消し、理想的な相互作用力を保つものだ。これまで難しかった中等度や重度の片まひ患者に適応するリハビリテーションロボットへの応用が期待される。
関連記事
 市販のコンタクトレンズに搭載できる、複合マイクロメッシュ電極を開発
市販のコンタクトレンズに搭載できる、複合マイクロメッシュ電極を開発
早稲田大学は、市販のコンタクトレンズに搭載できる、透明で柔らかい複合マイクロメッシュ電極を開発した。80%以上の透過性を有するほか、網膜の局所的な応答を計測する複数点同時網膜電位計測が可能になった。 周術期のパラメーターを測定できる、医療用ポータブル体成分分析装置を発売
周術期のパラメーターを測定できる、医療用ポータブル体成分分析装置を発売
テルモは、周術期の患者の管理に重要なパラメーターを測定できる、医療用ポータブル体成分分析装置「ラチェッタ」を発売した。本体重量は310gと小型かつ軽量で、15秒という短時間で測定できる。 手術器具の自動交換が可能なマイクロサージャリー支援ロボットを開発
手術器具の自動交換が可能なマイクロサージャリー支援ロボットを開発
ソニーグループは、手術器具の自動交換と精密操作に対応する、マイクロサージャリー支援ロボットを発表した。愛知医科大学で、マイクロサージャリーを専門としない医師と医療従事者が試作機を実験し、動物の血管の吻合に成功した。 米ぬか由来ナノ粒子の抗がん作用を確認
米ぬか由来ナノ粒子の抗がん作用を確認
東京理科大学は、米ぬか由来ナノ粒子が優れた抗がん作用を示すことを明らかにした。未利用バイオマスを原料とする、安価で安全な新しいがん治療薬の開発につながることが期待される。 欧州AI法やEHDSが進化を促すプライバシー強化技術の有力ディープテック
欧州AI法やEHDSが進化を促すプライバシー強化技術の有力ディープテック
本連載第93回で、一般データ保護規則(GDPR)を起点とする欧州のプライバシー保護技術(PET)の標準化と産業創出支援活動を取り上げたが、AI法や欧州保健データスペース(EHDS)の本格施行を控えて、PETを担うディープテックの活動が加速している。 駆動時間と冷却機能が向上したウェアラブルサーモデバイスキットの新モデル
駆動時間と冷却機能が向上したウェアラブルサーモデバイスキットの新モデル
ソニーサーモテクノロジーは、首元に装着して体表面を冷やしたり温めたりできるウェアラブルサーモデバイスキット「REON POCKET 5」を発売した。従来品よりも駆動時間が延び、冷却機能が向上している。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
医療機器の記事ランキング
- 1分間隔で日常生活下の血圧を測定できるプログラムを発売
- 医療文書の作成時間を30分から5分へ、生成AIで現場の業務効率化
- アトピーのかゆみや症状に差が出る理由、T細胞受容体の違いにあり
- NTTが養殖飼料向け珪藻を育種、DHAなど5種の脂肪酸が1.8倍に
- 血液中のがんマーカーを基準値の1000分の1濃度で計測、数分での検査が可能に
- 肌のキメには“凸凹”が必要だった! ヒトの皮膚再現モデルを富士通が開発
- 0.02mmの極薄フィルムを採用した放射線治療用シールを発売
- 気温45℃でも15℃を維持、冷却性能が1.6倍になった水冷ウェアを開発
- 花王が新たな保湿技術を構築、周囲の水分を引き寄せてうるおい続く
- 「記憶があるのに思い出せない」はなぜ? 脳の神経活動のゆらぎが関係か
コーナーリンク




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。