自動ブレーキも横滑り防止装置も、ドライブバイワイヤあってのものだね:いまさら聞けない 電装部品入門(11)(2/4 ページ)
スロットルポジションセンサー
アクセルポジションセンサーからの出力値を受信したCPUは、走行状況(他のセンサー情報)を踏まえて「目標スロットル開度」を決定します。
その目標スロットル開度まで開くように、的確な駆動信号がスロットルボディ内にある駆動モーターに出力されることでスロットルバルブは開閉します。しかしここで、CPUから受け取った駆動信号を駆動モーターが正しく再現できず、目標スロットル開度と異なる駆動をしてしまったら大変です。
つまり、安全性を確保するには、この駆動モーターが正しく機能しているかを監視する必要があります。その大きな役目を背負っているのがスロットルポジションセンサーなのです。
スロットルポジションセンサーも、アクセルポジションセンサーと同様に2系統用意することで、安全性と信頼性を確保しています。
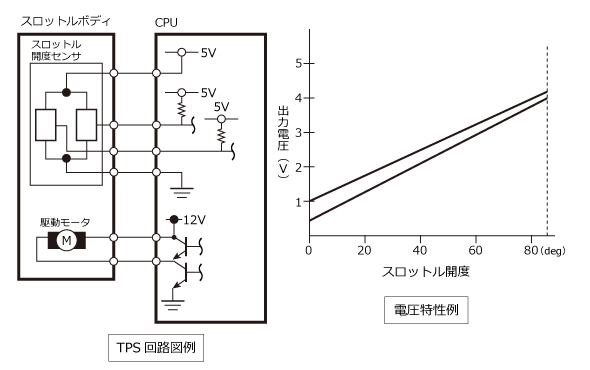 スロットルポジションセンサーの回路図と電圧特性の例
スロットルポジションセンサーの回路図と電圧特性の例スロットルポジションセンサーが検知した実スロットル開度値はCPUへと送信され、目標スロットル開度値と比較されます。
これら双方の値の間でズレが生じていると、駆動モーターもしくはスロットルバルブ、スロットルバルブポジションセンサーのいずれかに異常があると判断し、CPUは安全確保のためにDBWシステムの機能を停止させます(故障判定回路が組み込まれていますので、異常箇所を具体的に特定できます)。
DBWシステムのフェイルセーフアクション
電子制御システムにおける最も重要な考え方は安全最優先です。
運転を続けることで安全性を損なう可能性がある場合は、まず運転ができない状態へと車両を移行させます。
“運転ができない状態”と表現しましたが、意図的にエンジンを停止させてしまうことは基本的にはありません。なぜならば、走行状態でエンジンが停止してしまうと、
- オルタネータの停止に伴って発電ができなくなるため、電装部品(電動パワーステアリング含む)が機能停止
- 吸気負圧が無くなるため、制動力を補助する真空制動倍力装置が機能停止
- エンジンによって駆動される油圧パワーステアリング機構が機能停止
といったように、自動車として最も重要な要素と言える、走る・曲がる・止まるという基本性能に大きな影響が出てしまうからです。
DBWシステムのフェイルセーフアクションとしては、まずメータークラスタ内にあるエンジンチェックランプを点灯させてドライバーに異常を知らせることになります。
 エンジンチェックランプ
エンジンチェックランプ 電気駆動力がゼロになったスロットルバルブのデフォルト状態
電気駆動力がゼロになったスロットルバルブのデフォルト状態フェイルセーフアクションに移行した時点で、何らかの理由でアクセルペダルとスロットルバルブがドライバーの意思に沿って動いていない状態ですので、安全性を重視してスロットルバルブの電気駆動を完全に止めます。つまり、どれだけアクセルペダルを踏み込んでもスロットルバルブは駆動されません。
しかし電気駆動力がゼロになった際にスロットルバルブが全閉になってしまう構造にしていると、吸入空気量がゼロになってエンジンが停止してしまいます。
そうならないように、電気駆動力がなくてもスロットルバルブをスプリング力で最低限開かせます。これによって電気駆動力がゼロになっても、エンジンが停止しない程度の吸入空気量を確保できるとともに、公道上で最低限の退避走行ができるように、通常のアイドリング回転数よりも高い回転数を維持してクリープ力を高める仕組みになっています。
Copyright © ITmedia, Inc. All Rights Reserved.
モビリティの記事ランキング
- スズキの「R06A型」エンジン搭載車50万台がリコール、「スペーシア」など
- 新型「CX-5」のコックピットは3つのECUを統合、パナソニックオートの「CDC」で
- レアアース泥調査でも活躍、JAMSTEC海底広域研究船「かいめい」をガッツリ見る
- 金型発注前のEV開発中止、ホンダはできなかったのにトヨタはなぜできたのか
- 日産「e-POWER」搭載車約60万台がリコール、「ノート」「エクストレイル」など
- 2025年の自動車部品の他社けん制力ランキングを公表、トップはデンソー
- ジムニーのMT仕様車がリコール、エンスト時に不具合起こす恐れ
- 脱炭素はEVのみならず、いすゞ出光らがバイオ燃料100%のトラック公道実証へ
- デンソーテンが提案したUWB無線の干渉抑制技術が国際標準規格に採用
- 日産「AIで再び世界トップの開発力へ」、独自の統合型次世代AIDV基盤描く
コーナーリンク
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。