今年の新ミッションは2輪倒立ロボットの制御だ!:ETロボコン2009、挑戦記(1)(2/2 ページ)
ETロボコン2009の全体像
昨年度からの大きな変更点は、地区大会の開催地区が2地区追加されたことと、新走行体としてNXTが加わったことだ。新しい開催地区は北関東地区(群馬県の太田市)と南関東地区(神奈川県横浜市)で、北関東地区に関しては、今後群馬県と新潟県での交互開催を検討しているという。
ロボットはRCXとNXTのどちらかを自由に選択できる。以下の表を参考に、検討してみてはいかがだろうか。
| 機能 | RCX | NXT |
|---|---|---|
| CPU | H8(8ビット、16MHz) | ARM7(32ビット、48MHz) |
| メモリサイズ | 32Kbytes | ROM+RAM 64Kbytes(拡張標準フォームウェア) ROM 224Kbytes/RAM 50Kbytes(NXT BIOS) |
| デバイスI/O | センサー×3ch モーター×3ch |
センサー×4ch(A/D、I2C) モーター×3ch(分解能1度のエンコーダ内蔵) |
| 表示 | 液晶 | 100×64ピクセル液晶 |
| サウンド | 8bit PCM | 8bit PCM(トーン/WAV出力対応) |
| 通信 | 赤外線 | Bluetoothマスタ/スレーブ(NXT/PCと通信可能) USBスレーブ(PCと通信可能) |
| コンパイラ | GCC for H8 | GNU ARM(GCC 4.0.1) |
| 開発環境(オープンソース) | BrickOS C/C++ leJOS Java |
nxtOSEK(TOPPER/ATK) C/C++ leJOS NXJ Java |
| 表 LEGO MINDSTORMS RCXとNXT(新走行体)の比較 | ||
新走行体NXTおよび開発環境について
説明会では、ETロボコン技術委員の近政 隆氏から、新走行体NXTの概要および開発環境について説明された。
 画像4 ETロボコン実行委員会 技術委員 近政 隆氏
画像4 ETロボコン実行委員会 技術委員 近政 隆氏「NXTのスペックについては、端的にいうと従来型のRCXに対して、CPUが大幅にパワーアップしています(8bitマイコンから、32bitのARM7コアのチップに)。このハード面での大幅な進化によって、参加者は性能面およびモデリングの両面でいろいろなことが試せるようになります」(近政氏)
NXTは一般的に2輪倒立振子ライントレースロボットという名称で呼ばれ、ロボット工学の2足歩行ロボットなどに代表される、不安定なものを安定化して動かす制御要素を取り入れている。開発環境はETロボコン実行委員会から支給され、すべての参加者が無償で入手できる。そのほか、実行委員会からはシンプルなサンプルソースコードと、フリーOS、NXTを2輪で立たせるためのライブラリ(C言語のAPIを予定)が提供されるという。
「NXTはプロセッサの能力が上がったというのもありますが、やはりいろいろな開発環境が対応しているというのもメリットではないでしょうか。Microsoft Visual StudioやMATLABなどの開発環境を自由に組み合わせて、参加していただきたいと思います」(近政氏)

オープンソースで提供される開発環境は、組み込み業界で一番普及しているというC、C++向けの開発環境「nxtOSEK」と「nxtJSP」。名古屋大学の高田広章教授が推進しているTOPPERSプロジェクトの成果物であるTOPPERS/ATKおよびTOPPERS/JSPというリアルタイムOSを、NXTに移植した国産のオープンソースプロジェクトの環境だという。従って、リアルタイムOSは自動車のエンジン制御などで使用されているOSEK仕様に基づいたリアルタイムOSもしくはμITRONのいずれかを選択できる。また、モデルベース開発など、自動生成コードを含めた開発プロセスにも対応しているとのこと。
そのほかの競技内容については現在検討中で、春以降に告知される。
審査方法について
審査方法については、ETロボコン審査委員の鷲崎 弘宜氏から説明された。
 画像6 ETロボコン実行委員会 審査委員 鷲崎 弘宜氏
画像6 ETロボコン実行委員会 審査委員 鷲崎 弘宜氏 鷲崎氏は、第1回大会と昨年大会の優秀モデルを比較し、「開催回数を重ねるごとに構造の作りこみや分析が丁寧になり、絵や図に書いて設計するスキルが着実に向上している」と述べた
ETロボコンでは昨年度から評価方式を変更し、実際に大会で走らせた競技の結果と、大会前に提出するモデルを総合的に評価している。その結果、昨年の大会では、走行とモデルが非常に良くバランスの取れたチームが総合評価で上位にランクインし、ハードウェアの使いこなしや制御のチューニングに力を入れた典型的な組み込み開発を行っているチームや、論理的手法やモデルの整理検討ができているがハードウェアの制御がおろそかになっているチームなど、これまで上位にいたチームが総合結果で上位に入るのは難しくなっている。
「実行委員としては、走行とモデルのバランスが取れたチームがもっと多数登場してくるようにと期待しております。図で要求からモデル、プログラム、そしてその結果を実際走らせるという思考を繰り返して最終的なシステムを完成させる一連の流れを取ったときに、それらをすべてきちんとつないでほしいということです。つまり、要求からモデルを書き、構造や振る舞い、制御を検討し、それをプログラムへと具象化して落とし込みます。そしてその結果を思考し、思考して終了ではなく、その結果をもう一度抽象化して、図の上で検討する。このサイクルを繰り返すことで、品質が向上することを期待しています」(鷲崎氏)
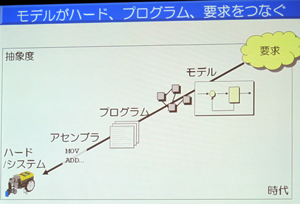 画像7 鷲崎氏の発表スライド
画像7 鷲崎氏の発表スライドまた、モデルを審査する実行委員の体制も少し変わる。昨年までは、審査委員や性能審査団と呼ばれる本部の実行委員を中心に、全員ですべての地区の審査を行っていたが、今年からは本部ではなく、各地区大会で現地の実行委員がじっくり時間をかけて審査を行うという。
「本部ではチャンピオンシップ大会(全国大会)や地区審査員の確保、育成、サポートにあたることで、組み込み技術者の裾野拡大に貢献できればと考えています」(鷲崎氏)
実施説明会は2月20日の東京地区からスタートし、3月中旬の沖縄まで、各地区で開催される。
本連載では、今後もETロボコン2009の動向を随時お伝えする。お楽しみに!
関連記事
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 日本再起の旗印となるか、国産マルチモーダルAI基盤「FRONTia」が始動
- 大腸がんを低侵襲に治療できるESD、オリンパスが内視鏡ロボット技術で容易に
- TSMCの“Beyond 2nm”技術の現在地、「A14」で第2世代ナノシートトランジスタへ
- 既設光ファイバーで450Tbps伝送に成功、周波数帯域幅を従来の4倍以上に拡大
- NVIDIAが「Jetson Thor」に新モジュール追加、高騰するメモリの使用量削減技術も
- インテグレーション地獄からの脱却:構造問題と「インテグレーター人権宣言」
- 酸素供給スーツで3時間潜水するサイボーグ昆虫
- 製造業の設計開発と情シスの部門間にある「ダニング・クルーガー効果」の谷
- NVIDIAフアン氏が神田に現る――日本製造業巻き込む「ジャパンAI協業」祭り
- サブ1nm半導体チップ技術を発表、性能最大50%向上
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。