組み込みの祭典Embedded Technology 2005:組み込みイベントレポート(3/3 ページ)
激走! ETロボコン チャンピオンシップ大会
ET2005の併催イベントとして、会場の一角に設けられた“特設サーキット”で開催された「ETソフトウェアデザインロボットコンテスト チャンピオンシップ大会」(以下、ETロボコン)は立ち見が出るほどの観客を集め、展示会場とは異なる熱気にあふれていた。ETロボコンの前身は、過去3回開催された「UMLロボットコンテスト」。2005年からETに舞台を移し、予選会(7月開催、参加53チーム)を勝ち抜いた20チームによる第1回のチャンピオンシップ大会として行われることになった。
ETロボコンとは、組み込み開発者を育成する目的で日本システムハウス協会(JASA)が主催、情報処理推進機構(IPA)などが協力して運営する産学協同の活動で、組み込みソフトウェアの設計モデリングと、走行体を実際に走らせるロボット制御の両者を競うコンテストだ。
走行体は、自走ロボットの「LEGO MindStorms」を使用する。入力情報は路面の色を識別する光センサとステアリングの舵角を検知するタッチセンサ、出力として車輪を駆動するモーターとステアリングモーターを備える。ハードウェアの性能は各チーム共通で、UMLモデリング手法によるソフトウェアの性能で優劣が決まる。
まずはレースの模様を見ていただこう。
 写真6 ETロボコンが行われた特設サーキット。マシンはイン・レーン、アウト・レーンを各2周ずつ走行し、合計タイムで順位が決まる。速いマシンの走行タイムは40秒ほど。コースアウトしたりほかのマシンを妨害するとリタイアとなる
写真6 ETロボコンが行われた特設サーキット。マシンはイン・レーン、アウト・レーンを各2周ずつ走行し、合計タイムで順位が決まる。速いマシンの走行タイムは40秒ほど。コースアウトしたりほかのマシンを妨害するとリタイアとなるコースは大小のコーナーを有するテクニカルなレイアウトで、マシンは路面に描かれた黒ラインをトレースしながら自走し(リモコン操作なし)、走行タイムを競う。コースにはオフロード、ショートカットといった“難所”が設けられ、クリアするとボーナスタイムが与えられる。最も難易度が高かったのは、コース上に障害物が置かれたオフロード。車体が大きく傾いた際に、車体前方にある光センサをいかに制御するかが難問だったようだ。
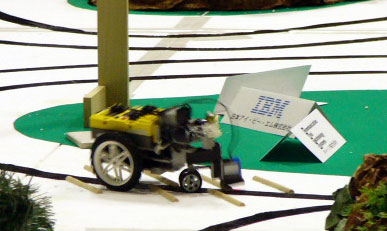 写真7 最大の難所「オフロード」。コース上にかまぼこ形の棒が並べられている。別ルートを選んでオフロードを回避することも可能だが、無事通過できるとマイナス10秒のボーナスタイムが与えられる。2周ともここを通過できたのは1チームのみだった
写真7 最大の難所「オフロード」。コース上にかまぼこ形の棒が並べられている。別ルートを選んでオフロードを回避することも可能だが、無事通過できるとマイナス10秒のボーナスタイムが与えられる。2周ともここを通過できたのは1チームのみだった設計モデリング部門では、各チームが提出したUMLによるモデリング設計図を審査し、入賞者を決定する。今回のチャンピオンシップ大会はレースのみ。7月の予選会でモデリング審査上位チームは、モデル図が会場に掲示されていた。
モデリング審査部門
| 賞 | チーム名(所属) |
|---|---|
| エクセレント・モデル | あジャイ子2(リコー) |
| ゴールド・モデル | アルゴノーツ(アルゴ21) |
| シルバー・モデル | 新潮流(個人) |
チャンピオンシップ大会のレース結果は以下のとおり。
レース部門
| 順位 | チーム名(所属) |
|---|---|
| 1位 | ムンムン(NECソフトウェア北陸 第三ソリューション事業部 組込み&ツール開発グループ) |
| 2位 | アルゴノーツ(アルゴ21) |
| 3位 | チャージ&ダッシュ(個人) |
| 4位 | ハッスルCATS(キャッツ ソフトウェア事業部 ソリューション課) |
| 5位 | TJ宮ノ台(東芝情報システム 第一エンベデッドシステム ソリューション事業部) |
設計モデリングの上位入賞者が必ずしも走行タイムに優れているわけではないところが、組み込み開発の奥深さ。その点では、両部門で上位入賞を果たしたアルゴノーツは大健闘といえる。抽象的な概念を用いるUMLモデリングとハードウェアの性能を引き出す組み込み開発ならではの作り込み、この両者のバランスをどう取るか。ここは組み込み技術者として腕の見せ所だろう。
ETロボコンには、早くも来年のエントリを表明するチームもあるという。多くの参加者を集めることで、組み込みエンジニアのモデリング技術向上につながることを期待したい。
| 関連リンク: | |
|---|---|
| ⇒ | 日本システムハウス協会(JASA) |
| ⇒ | 情報処理推進機構(IPA) |
| ⇒ | LEGO MindStorms |
| ⇒ | ETソフトウェアデザインロボコン |
関連キーワード
Windows Embedded 関連 | 組み込み | 組み込み開発スキル | ロボット開発 | 組み込みデータベース | ESEC | ETロボコン | Embedded Technology
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。