加速度データから人と自動車の位置関係を特定、5cm精度で毎秒2000回検出可能:車載ソフトウェア
東陽テクニカは、加速度データから人間と自動車の移動軌跡を算出し、両者の位置関係を特定する技術の特許を取得した。人と自動車の位置関係を約5cmの精度、2000回/秒の頻度で検出することができる。
» 2020年07月16日 07時30分 公開
[MONOist]
東陽テクニカは2020年6月23日、慣性計測装置(IMU)で取得した加速度データから人間と自動車の移動軌跡を算出し、両者の位置関係を特定する技術の特許を同年4月8日に取得したと発表した。
 人と自動車の位置関係を特定 出典:東陽テクニカ
人と自動車の位置関係を特定 出典:東陽テクニカ同技術では、複数のセンサー素子で構成される、加速度と角速度を検出する装置であるIMUを使用。IMUで自動車の加速度データを計測し、それぞれの移動量から移動軌跡を算出して、両データのタイムスタンプを同期させることで、両者の位置関係を特定する。
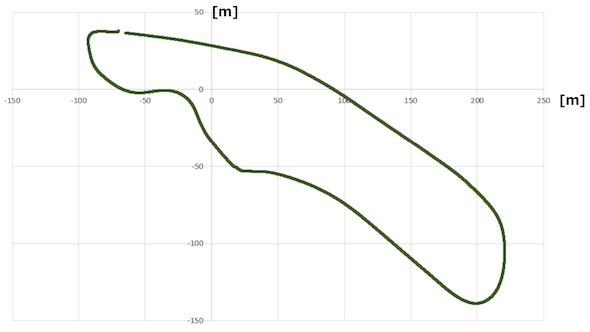 IMUの計測のみで描いた自動車の移動軌跡 出典:東陽テクニカ
IMUの計測のみで描いた自動車の移動軌跡 出典:東陽テクニカ人と自動車の位置関係を約5cmの精度、2000回/秒の頻度で検出するため、自動運転やADAS(先進運転支援システム)への応用が見込まれる。GPSなどの測位システムと異なり、遮蔽物が多い公道や屋内でも使用可能だ。
さらに、IMU以外の測定システムから得たデータも同期可能で、ドライバーの視線計測システムと同期し、ドライバーの視線が歩行者を捉えたタイミング、その時の歩行者と自動車の位置を正確に測定できる。また、ペダル操作や操舵など車両の挙動に関するデータとの同期にも対応する。
同社は今後、計測機器と同技術を組み合わせた新たな自動車計測技術を開発し、製品化を目指す。
関連記事
 AGV自律走行の誤差1cm以内を実現、高精度な自己位置推定技術が支える
AGV自律走行の誤差1cm以内を実現、高精度な自己位置推定技術が支える
リンクスはAGV(無人搬送車)向けナビゲーションソフトウェア「Navitrol」について解説するセミナーを東京都内で開催した。Navitrolはフィンランドのソフト開発メーカーNavitec Systemsが開発した製品で、ナチュラルフューチャーナビゲーション(NFN)技術などによりAGVの高精度自己位置推定を実現し、事前に指定した経路との誤差1cm以内での自律走行を実現する。 既存設備の変更なしにAGVが自律運転、障害物検知で人との協働空間にも
既存設備の変更なしにAGVが自律運転、障害物検知で人との協働空間にも
技術商社のリンクスは2019年11月7日、東京都内で記者発表会を開き、フィンランドNavitec Systemsが開発するAGV(無人搬送車)向けナビゲーションソフトウェア「Navitrol」の国内販売を2020年3月頃から開始すると発表した。 ビーコン不要の動線分析、ToFカメラで測位誤差は最小5cm
ビーコン不要の動線分析、ToFカメラで測位誤差は最小5cm
スプリームシステムは、「スマートファクトリーJapan 2019」(2019年6月5〜7日、東京ビッグサイト 青海展示棟)において、動線分析システム「Moptar」と棚前動作分析システム「Mopreach」の紹介を行った。 HEREの位置情報活用、共有基盤が日本向けに対応、データなどの販売も可能に
HEREの位置情報活用、共有基盤が日本向けに対応、データなどの販売も可能に
HERE Technoligies(以下HERE)は2019年5月15日、東京都内で記者会見を開き、クラウド上で位置情報データを検索、構築、共有するための共通データソース「Open Location Platform(オープンロケーションプラットフォーム)」を日本向けにローカライズし、2019年第2四半期末までに提供すると発表した。 保管位置を1m以内の高精度で測位、マーカー技術を開発
保管位置を1m以内の高精度で測位、マーカー技術を開発
NEC通信システムは、製造現場の資材や仕掛品、完成品の保管位置を高精度に測位する「マーカー測位技術」を開発した。屋内外の資材などの保管位置を1m以内の精度で正確に把握し、効率的に資材を管理できる。 トヨタ主導でグローバルな高精度地図、オープンAPIで更新から利用までワンストップ
トヨタ主導でグローバルな高精度地図、オープンAPIで更新から利用までワンストップ
トヨタ自動車、デンソー、アイシン精機の共同出資会社であるToyota Research Institute Advanced Development(TRI-AD)は、自動運転車向け高精度地図の普及を促進するため、「自動地図生成プラットフォーム(AMP)」を開発する。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special ContentsPR
特別協賛PR
スポンサーからのお知らせPR
Special ContentsPR
Pickup ContentsPR
モビリティの記事ランキング
- トヨタホンダ日産が中国で2桁%減、2026年5月の日系自動車生産はスズキの1人勝ち
- 矢崎総業がイノベーション拠点を公開、労働集約型モノづくりのスマート化に向け
- ヒューマノイドロボットの共同開発と量産化に向けた基本合意書を締結
- 自動運転スタートアップのティアフォーが上場、車載半導体のオープン化も視野に
- バッテリーに不具合 ダイハツ「ハイゼット トラック」など約30万台がリコール
- スズキの「R06A型」エンジン搭載車50万台がリコール、「スペーシア」など
- 自動車業界は脱グローバル化の時代へ移行 次の成長領域は「AI定義車両」に
- 小型EV「コムス」がリコール、パーキングブレーキの不具合に新たな原因が判明
- 日産「e-POWER」搭載車約60万台がリコール、「ノート」「エクストレイル」など
- スパイバーはなぜクールジャパン機構の出資を受けていたのか
Special SitePR
コーナーリンク



あなたにおすすめの記事PR
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。