月に向かって「苗木」を撃ち込め!――NHK大学ロボコン2013:決勝は近年まれに見る名勝負に(2/3 ページ)
今大会でも圧倒的な実力、東京大学の3連覇なるか!?
現在、2連覇中の東京大学(以下、東大)「RoboTech」チームは、今回も抜群の安定性とスピードを見せた。予選の2試合では、それぞれ43秒と44秒でGPを達成。決勝トーナメントの準決勝こそ、焦りからかミスによるリトライがあり、1分42秒もかかってしまったものの、それ以外の試合ではミスらしいミスが見られず、この完成度の高さはさすがの一言であった。
筆者はいつも思うのだが、NHK大学ロボコンでまず重要なのは戦略である。どのように木の葉を取り、リングに置いて、自動ロボに渡すか。そして、自動ロボは、どのように木の葉を受け取り、リングに置いて、苗木を取り、手動ロボに渡すか。それぞれさまざまなやり方が考えられ、その戦略次第で、タイムは早くも遅くもなる。
画面的には、どうしてもロボット本体が目立ってしまうが、試合の勝敗を左右するのは、戦略の優劣によるところが大きい。もちろん、戦略を着実に遂行するためには、ロボットの性能が重要であることは言うまでもないが、チームのベストタイムを決定付けるのが戦略で、ロボットの実装は、そのベストタイムにいかに近づけられるかの作業である。
東大チームのすごさは、練り上げた戦略だろう。例えば、最初の手動ロボで木の葉を運ぶ方法だけを見ても、非常にユニークだ。
木の葉は最低でも6個必要になるので、一度に運んだ方が有利。ここでは、ロボットアームを広げて一気に持ち上げる方法(水平方式)と、ダルマ落としのように縦に積み上げて運ぶ方式(垂直方式)に大きく2分されたが、東大チームが選択したのは、積み込み完了までの時間が短くて済む前者だ。
 垂直方式の長崎総合科学大学チーム。積み込みに時間はかかるが、自動ロボにまとめて渡せるメリットがある
垂直方式の長崎総合科学大学チーム。積み込みに時間はかかるが、自動ロボにまとめて渡せるメリットがある水平方式を採用するチームの方が多かったのだが、東大チームが独創的なのは、3×4に並んだ木の葉置き場の、斜めの列に注目したこと。ほとんどのチームは、2×3のような縦横だけの並びで木の葉をピックアップしていたが、これだと手動ロボが少し遠回りする必要があるし、ロボットの構造によっては、向きも変えなければならない。
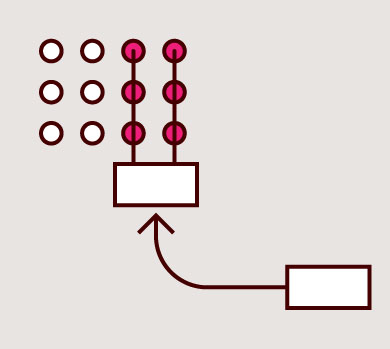 多くのチームに見られたパターン
多くのチームに見られたパターン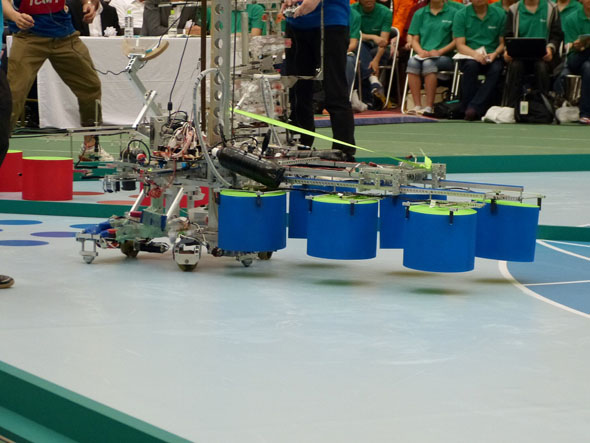 これは北見工業大学の手動ロボ。2×3=6個の「木の葉」を運ぶ
これは北見工業大学の手動ロボ。2×3=6個の「木の葉」を運ぶところが東大チームは、スタート地点から一気に木の葉置き場の角にダッシュすると、そのまま縦、横、斜めに3本のアームを出し、あっという間に7個の木の葉を確保していた。所要時間はわずか8秒程度。余分に積んだ1個は、今回は特に使われていなかったが、もしかすると“北半球”に4個置いて得点を増やす戦略も用意していたのかもしれない。
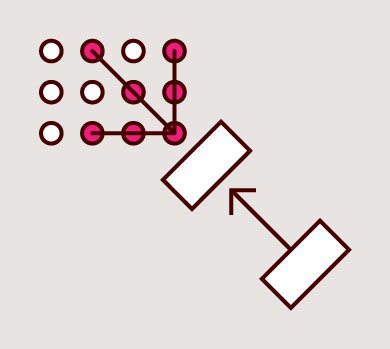 これは東京大学チームのパターン
これは東京大学チームのパターン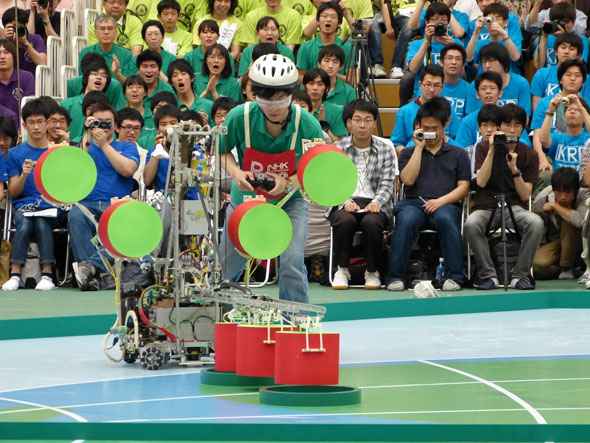 東京大学チームの手動ロボ。7個の「木の葉」を同時に運ぶことができる
東京大学チームの手動ロボ。7個の「木の葉」を同時に運ぶことができるこういったアイデア勝負の部分は、他のチームにも、もっと頑張ってほしいところである。東大チームはある意味、「ロボットを作る前から勝っている」といえるのではないだろうか。
また、苗木を月に飛ばす際には、レーザーセンサーで距離を計測しており、手動ロボが自動的に位置を調整するとのこと。人手で狙いを定めていては、どうしてもミスしやすい。自動化できるところは自動化するというのは、信頼性を向上させるためにも、非常に重要である。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。