クローズドループ構造のいろいろ:メカメカリンクで設計しよう(2)(2/3 ページ)
揺動(ようどう)とは
第1弾として、四節リンク機構を使って揺動運動する機構を紹介します。
揺動(ようどう)とは、「ゆれ動くこと。または、ゆり動かすこと」と定義されます。つまり、駆動リンクと従動リンクのどちらも回転せずに、ゆり動かす動作のものを取り上げます。
等長リンク(平行リンク)
【No.01】全てのリンクが等長の場合 その1
駆動リンクと従動リンク、中間リンク、固定リンクの全てが同じ長さの場合を考えてみましょう。図3のアニメーションから、下記のことが分かります。
- 駆動リンクが時計回り、反時計回りするのに関係なく、従動リンクも同じ角度で揺動する。
- 駆動リンクと従動リンクは、必ず対称性を持って揺動をする。
 図3 対向するリンクが等長の場合 その1
図3 対向するリンクが等長の場合 その1【No.02】対向するリンクが等長の場合 その2
固定リンクと中間リンクが同じ長さ、駆動リンクと従動リンクも同じ長さで、かつ駆動リンクの方が中間リンクより短い場合を考えてみましょう。
図4のアニメーションから、下記のことが分かります。
- 駆動リンクが時計回り、反時計回りするのに関係なく、従動リンクも同じ角度で揺動する。
- 駆動リンクと従動リンクは、必ず対称性を持って揺動をする。
 図4 対向するリンクが等長の場合 その2
図4 対向するリンクが等長の場合 その2【No.03】対向するリンクが等長の場合 その3
固定リンクと中間リンクが同じ長さ、駆動リンクと従動リンクも同じ長さで、かつ駆動リンクの方が中間リンクより長い場合を考えてみましょう。図5のアニメーションから、下記のことが分かります。
- 駆動リンクが時計回り、反時計回りするのに関係なく、従動リンクも同じ角度で揺動する。
- 駆動リンクと従動リンクは、必ず対称性を持って揺動をする。
 図5 対向するリンクが等長の場合 その3
図5 対向するリンクが等長の場合 その3その1〜3のリンク機構では、それぞれ対向するリンクが等長であると、駆動リンクと従動リンクは同期して同じ角度だけ移動し、対称性を保ちながら左右に揺動することが分かりました。
さらに、中間リンクに機能を持たせると、上下方向に移動はしますが水平を保ったまま左右に移動できることが分かりました。
それぞれ対向するリンクの長さが等長である四節リンクを、別名、平行リンクとも呼びます。
平行移動を目的にリンクを設計する場合に最初に考えるべきリンクが平行リンクといえます。
身近な機械製品でも、平行リンクが多用されています。
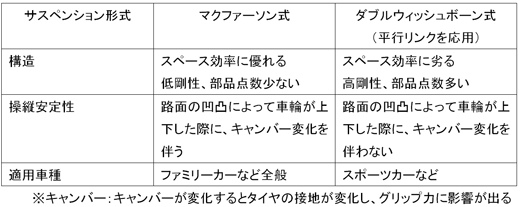
代表的なものに、自動車のサスペンション形式でその特徴を比較することができます。
図6のアニメーションを見ると分かりますが、平行リンクを応用している「ダブルウィッシュボーン式」では、路面の凹凸に対して、車輪が平行に上下動しています。
「マクファーソン式」では、路面の凹凸に対して、車輪が円弧を描いて上下動しています。
↓
 図6 自動車のサスペンション
図6 自動車のサスペンションそれぞれの特徴を表1にまとめました。
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 使用中に発火、サーキュレーター10万台をリコール
- 図面AIに「動かせる3Dモデル」の生成機能、関節や可動域を自動認識
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- 幾何公差の基準「データム」を理解しよう
- Autodesk Fusionで設計した超小型衛星「PRELUDE」が軌道投入、初期運用へ







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。