これで完全マスター! PID制御:独学! 機械設計者のための自動制御入門(10)(2/3 ページ)

回転するって言ったのはおまえだぜ。前回そう言ったやろ? 覚えてへんか? 正確には回転とは違うけど、ゲイン曲線は、図1の(τL・s+1)・(τH・s+1)の赤い曲線とω=1(rad/s)の交点を中心として、あたかも右回転するように変形するんや。図2を見れば理解できるやろ。

なるほどね。図2の1/τH<1、1/τL<1<1/τH、1<1/τLのときのグラフをみるとよく分かるね。積分1/sがゲイン曲線を時計回りに回転させるような効果があるねということは、微分sは反時計回りに回転させるような効果があるんだ。

そういうこっちゃ。だから、制御系に積分補償を加えると、低周波域のゲインがω→0で、∞となる。その結果、静特性が改善される。一方微分補償を加えると高周波域でのゲインがω→∞で∞となる。その結果、第8回で学んだようにカットオフ周波数が高くなり応答性が改善されるわけだ。しかし、積分補償の場合は位相が90°下がるから位相余裕がなくなるというデメリットがあるし、微分補償の場合は、高周波数ほどゲインが大きくなるので雑音を過剰に増幅してしまうというデメリットがある。
分かってきたぞ。PID制御をすると、低周波域と高周波域の両方でゲインが増加するから、静特性と動特性のいずれも改善することが期待できるんだ。
簡単に言ってしまえばそういうことなんや。よっしゃ、これでPID制御補償のコントローラーG1のボード線図がどういうグラフになって、どういう機能があるか分かったやろ。
ついでにPD制御とPI制御について考えてみると……。
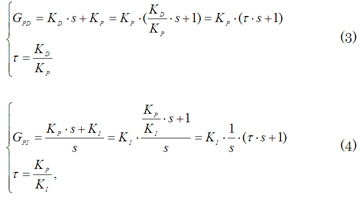
だから、それぞれのコントローラーのボード線図を描くと図3、図4のようになるね。
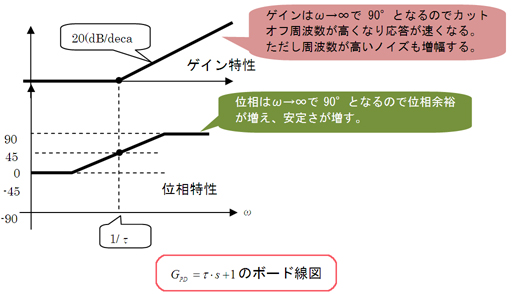 図3 PD制御のボード線図
図3 PD制御のボード線図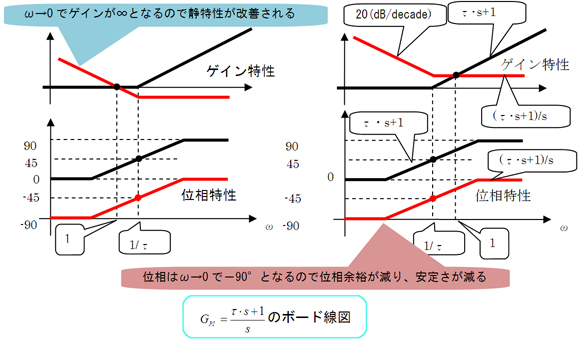 図4 PI制御のボード線図
図4 PI制御のボード線図いよいよPID制御の実践だ!
それじゃあ、横風を受けるときの自動走行制御システムにPID制御をすると、開ループ伝達関数Goのボード線図がどうなるか調べようか。まず、基本に立ち返って第9回の図3のブロック線図を思い出してみようや。
横風を受けるときの自動走行制御システムのブロック線図だね。車体が横風を受けてδ°旋回するから、風がなければ反対方向にδ°旋回するようにハンドル操作してやれば、相殺されて車は真っすぐ進む。そういう制御を車体の向きを検知して自動的にやろうということだね。
フィードバックシステムで重要なのは開ループの伝達特性における位相余裕あるいはゲイン余裕の大きさやったな。開ループの伝達関数はGsとG1とG2の掛け算や。コントローラーG1の伝達関数はGP、GPI、GPDあるいはGPIDのどれにするか最初は決まってへん。だから、まずはG1を除いたステアリングG2と車体Gsのボード線図を合体させる。すると図5のようになる。
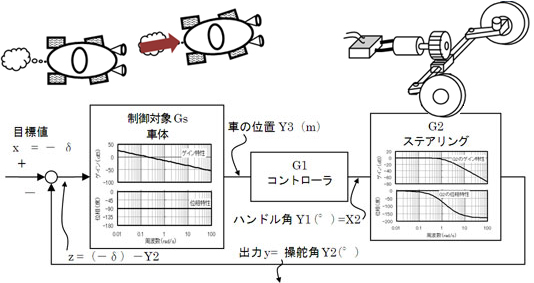 第9回の図3 横風を受けるときの自動走行制御システムの構成
第9回の図3 横風を受けるときの自動走行制御システムの構成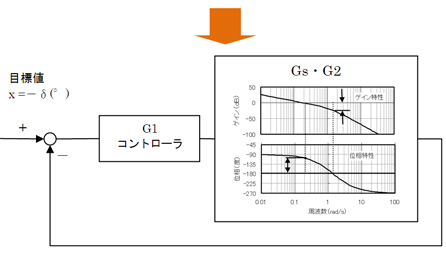 図5 横風を受けるときの自動走行制御システムの構成(今回)
図5 横風を受けるときの自動走行制御システムの構成(今回)第9回の図3のG1とG2のボード線図を合体させて1つの伝達関数としてみるんだね。
「真ん中のブロックG1を無視して、離れた2つのブロックを合体させていいの?」と思う人は、直列にならんだ3個の乾電池の順番入れ替えても同じや、と考えればいい。その説明で満足しない人は、線形理論を前提とした制御理論だから、と言えば分かるやろ。
ステアリングの伝達特性G2は、第3回の図9に示した方法で実験的に求めたんだよね。
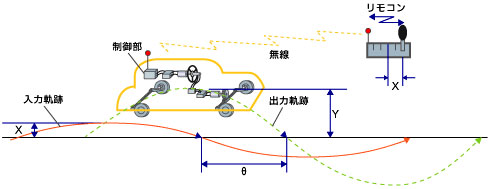 第3回の図9 自動車運転用実験者の周波数応答特性計測
第3回の図9 自動車運転用実験者の周波数応答特性計測ステアリングの具体的なボード線図は第4回の図2で紹介しました。車体の伝達関数については第4回の図3にその考え方を示し、図5に計算した結果のボード線図を載せています。
 第4回の図2 操作部G2のボード線図
第4回の図2 操作部G2のボード線図よく覚えとったなぁ。時速40kmで走っている車体のタイヤが1(rad)曲がると1秒あたりでは進行方向と垂直な方向、つまり横方向に40(km/h)×1000/3600(h/s)=11.11(m/s)の速度で移動するから、1°では11.111/180×π=0.194(m/s)の速度で移動する。横方向の移動距離は運転している時間だけ変化するから、これを積分したのが車体の伝達関数Gsとなる。ラプラス変換表示すれば、
Gs=0.194/s (5)
や。
 図6 タイヤのステアリング角度が1°のときの車の横方向移動速度
図6 タイヤのステアリング角度が1°のときの車の横方向移動速度
ステアリングG2のボード線図は実験で求めたんじゃないの?
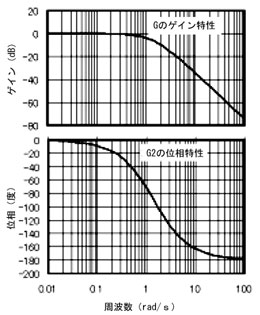
第4回でも言ったことやけど、ステアリングの周波数応答特性は実験でも求められるが、計算からも求めることができる。これについては、またあとで詳しく説明するとして、取りあえずステアリングG2の伝達関数は(6)で与えられると思ってや。あるいは第4回の図2のボード線図から(6)を推定したと思ってもらってもええで。
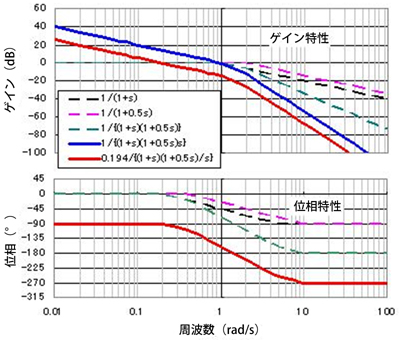 図7 GsとG2が合体したボード線図(簡易作図)
図7 GsとG2が合体したボード線図(簡易作図)図7のGs・G2のボード線図に図2のコントローラーG1=GPIDのボード線図を足せば、開ループ伝達関数のボード線図が得られる。
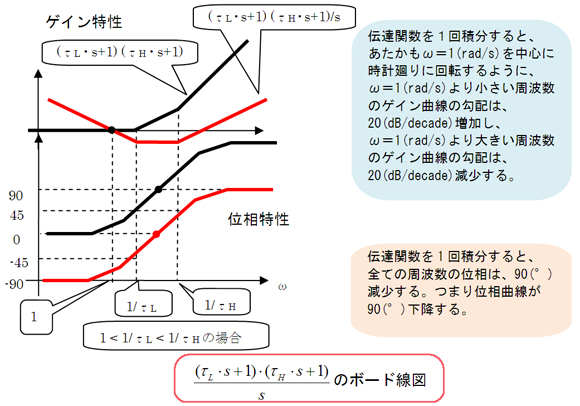 図2
図2位相余裕が大きく、かつカットオフ周波数が高くなるように(1)のKP,KI,KDを選択すればいいんだよね。
 式1
式1そうやけど、図2のコントローラーG1=GPIDのボード線図は、KP,KI,KDの値が決まってないと描けへん。だから、まずは、適当にKP,KI,KDの値を決めてやって、G1=GPIDのボード線図を描く。そして、図7のGs・G2のボード線図とを足して、開ループの伝達関数Go=G1・Gs・G2のボード線図を描くんや。
すると、KP,KI,KDの値は試行錯誤で決めるっていうこと? そうじゃなくて、もっと合理的な方法で選択する方法はないのかな?
そうやな……。実際の設計ではボード線図はエクセルやその他制御設計用の専用ソフトを利用するから、KP、KI、KDをいろいろ変えてボード線図を描くことは簡単にできる。そうやってボード線図を描いてみると、KP、KI、KDの値によってグラフがどう変わるか、その傾向が見えてくる。だから、草太が思うほど面倒やないんやで……。あえて、というなら、こんな方法はどうやろ。
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 使用中に発火、サーキュレーター10万台をリコール
- 【レベル14】生成AIを味方に、3D CADを使いこなそう!
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 最大0.03mmの精度、黒色/光沢素材にも対応する4モード3Dスキャナー
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- 営業製作所、図面管理システム「ジーエン図面」の販路拡大へSB C&Sと契約







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。