デザインとメカ設計が“戦う”のではなく“融合する”、デンソーの製品開発文化:メカ設計イベントリポート(2/3 ページ)
ねじ穴をなくそう
依頼が来た時、そもそも従来製品にあるねじ穴が、清潔さを維持する上では大きな問題になりそうだと折笠氏は感じた。そこで打ち合わせの場でスケッチを描き、ねじがなくなれば、いかに汚れがたまらず洗浄もしやすく、見た目も洗練されるか説明した(図2)。
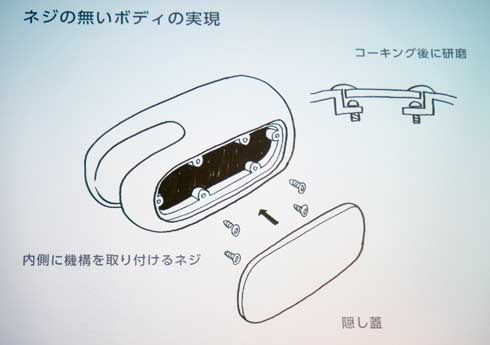 図2 ねじのないボディのスケッチ
図2 ねじのないボディのスケッチねじ穴が汚れの元になるという問題はすんなりとエンジニアと共有できたが、「最も幸運だったのは、エンジニアが問題の解決だけでなく、最終的に優れたデザインにつながることの方に大きな関心を示してくれたこと」だと折笠氏は述べる。このねじ穴をなくすという目的の共有を皮切りに、表面に凹凸がなく滑らかな形状を持つロボットが、早い段階でデザイナーとエンジニアの共通コンセプトとなっていった。
ねじのないボディについては、アイデアを持ち寄って話し合った結果、内側にねじを取り付けて、隠しふたを被せ、その上からコーキング後、研磨して、ふたを閉じ切りにする方法を採った。この方法だと一度閉じれば開けられなくなってしまう。そこで長年のロボットの稼働実績から故障モードやメンテナンス頻度などを割り出し、必要なふたの数を絞り込む作業に時間を掛けたという。
汚れがたまらず洗いやすい形状は?
一方、汚れを蓄積させず、洗浄しやすくするためには、あらゆる溝や段差がなく滑らかであることが必要だと考えた。最初にイメージしたのは、通常のロボットを液体金属にフォンデュ(※)のように浸したものだったそうだ(図3)。
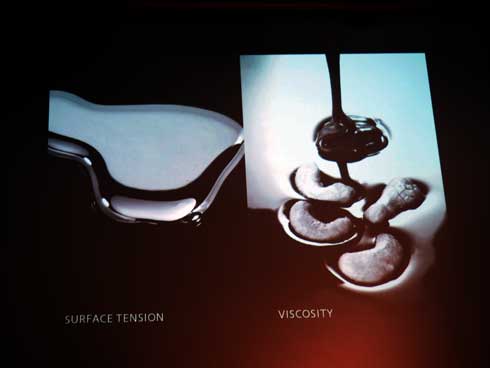 図3 外形のイメージは“液体金属のフォンデュ”だったそう
図3 外形のイメージは“液体金属のフォンデュ”だったそうイメージを形にするためにこだわったことの1つは曲率連続だという(図4)。
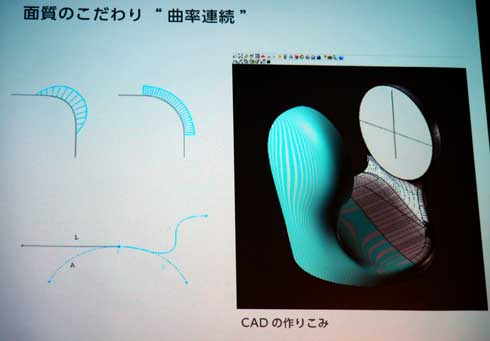 図4 面質のこだわりの1つが曲率連続である
図4 面質のこだわりの1つが曲率連続であるまた特にこだわったのが、関節の断面を真円にするということだ。従来の関節の断面は四角形だったため、ロボットが回転する時にすき間ができ汚れがたまる場所になってしまう。もちろん外形を変化させるためには、内部の構造も検討し直さなければならない。これは設計サイドと相談を繰り返しながら形状を詰めていった。
折笠氏はこの形状を設計するために、通常使うデザイナー向けCADに加えて設計者向けCADの操作も一から覚えたという。編集可能な、柔軟性のあるデータを作るためだ。非常に有機的な形状をデザイナー向けCADだけでなく設計CADでも扱えるよう、両方に互換性のある機能を研究し、形状の作り込みに時間を掛けたという。
形状だけでなく、動きの気持ちよさにもこだわった。ロボットのように可動する製品は、どんなポーズでも美しく見えて、その動きが魅力的であってほしいという考えからだ。関節の断面を真円にしたのも「動きの気持ちよさ」にもつながると考えたからだそうだ。関節が駆動するモックも作り、何度も検討を重ねていった。
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 使用中に発火、サーキュレーター10万台をリコール
- 図面AIに「動かせる3Dモデル」の生成機能、関節や可動域を自動認識
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- 幾何公差の基準「データム」を理解しよう
- Autodesk Fusionで設計した超小型衛星「PRELUDE」が軌道投入、初期運用へ







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。