決勝迷路は史上最長の最短経路――トップは何と7秒台、画像処理マウスも大健闘!!:第34回全日本マイクロマウス大会 リポート(2/3 ページ)
決勝迷路は、史上最長の最短経路!? 加藤雄資さんの「Tetra」が連覇
86台が出場した今大会のエキスパートクラスで優勝したのは、加藤雄資さんが製作した「Tetra」だ。記録は7秒939。決勝に進出した34台のうち唯一7秒台でゴールし、見事連覇を果たした。
今回の決勝迷路は、「史上最長の最短経路かもしれない」(迷路製作委員会)といわれるように、スタート地点からゴール地点までの歩数が長いのが特徴だった。
 画像4 競技の合間に「Tetra」のタイヤをクリーニングする加藤雄資さん
画像4 競技の合間に「Tetra」のタイヤをクリーニングする加藤雄資さん迷路の外周に長い回廊を設けてあるため、経路の選択肢は限られている。そういう意味では、全マウスが違う経路を選択していた前回大会と対照的な迷路といえる。それならば、カンタンに攻略できるのか? というと、そうは問屋がおろさない。
この回廊を突破できないマイクロマウスが少なからずいた。一般的にマイクロマウスは壁の切れ目を見て、走行距離の補正をかけている。長い直線では距離補正が効かないため、制御が甘いと四隅に設けられたポケットにハマってしまうのだ。
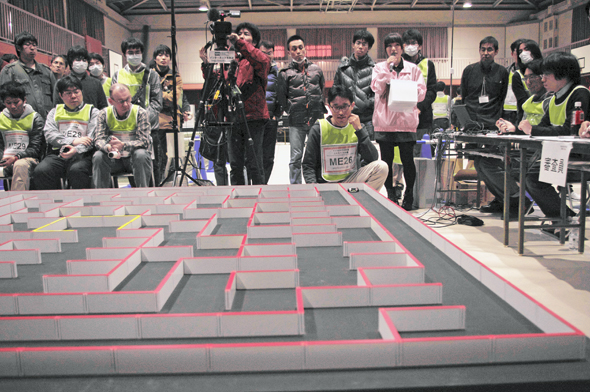
 画像5 「第34回全日本マイクロマウス大会」決勝迷路。あなたはゴールへの最短経路を何秒で発見できる?
画像5 「第34回全日本マイクロマウス大会」決勝迷路。あなたはゴールへの最短経路を何秒で発見できる?マイクロマウスに限らず、自立走行ロボットにとって「真っすぐ走行し、目的地で曲がる」のは基本だろう。「皆さん、マイクロマウスの基本性能はカンペキですよね?」と、ニッコリ問い掛ける迷路製作者の声が聞こえてきそうな課題だ。
しかし、実際にロボットへ実装しようとすると難しい。そもそも、16区画の直線コースを自宅に用意できる人も皆無だろう(部費や部室を使える学生は別だろうが)。すなわち、事前にテストできる環境がないのだ。迷路が公開された瞬間、参加者は口々に「イヤらしい迷路だなぁ」とつぶやき、この回廊で何度もつまずいた決勝出場者は「……。まだ、迷路の入り口にたどり着けていません(泣)」とコメントしていた。
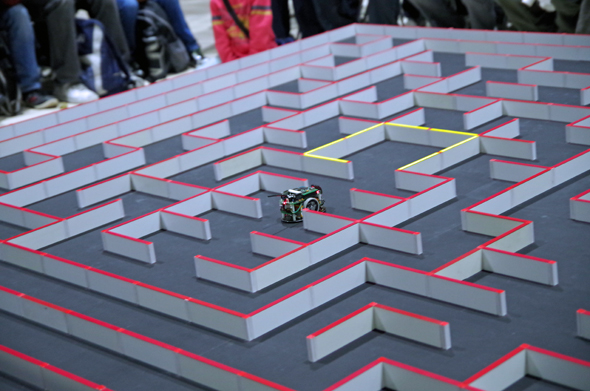
 画像6 長い直線の果てに袋小路が仕掛けてある。走行時に距離補正がうまく機能しないと、この前後の袋小路にハマる
画像6 長い直線の果てに袋小路が仕掛けてある。走行時に距離補正がうまく機能しないと、この前後の袋小路にハマるもう1つの難所は、ゴール前にある直線区間だ。両側にくし歯状に壁の断面が連続しているため、左右の壁との距離を計測しながらコースの中央を走行するのが難しい。しかも、連続90度ターンの直後、マイクロマウスの姿勢が崩れた状態でこのくし歯ゾーンに突入するのだ。ゴール前まできてクラッシュするマイクロマウスも見受けられた。
 画像7 ゴール前の難関「くし歯」。ここまできてクラッシュするマイクロマウスも多かった!
画像7 ゴール前の難関「くし歯」。ここまできてクラッシュするマイクロマウスも多かった!それでは、優勝したTetraの走行を見てみよう。動画1は最短走行だ。速過ぎるので、スローモーションでもう一度再生している。
いかがだろうか? マイクロマウス競技を初めて見た多くの方が、このスピードに魅了される。しかしながら、マイクロマウス本来の面白さは、探索走行にあると筆者は思う。迷路内を右往左往しながら走行し、ゴールを目指すマイクロマウスは、けなげでカワイく、そして、賢い。探索走行は地味であるが「なぜ、このマウスはこんな走りをするのだろう」と考えながら見ていると、マイクロマウスそれぞれの個性が浮かび上がってくるのだ。
それでは、Tetraの気持ちになって探索走行を見てみよう(動画2)。
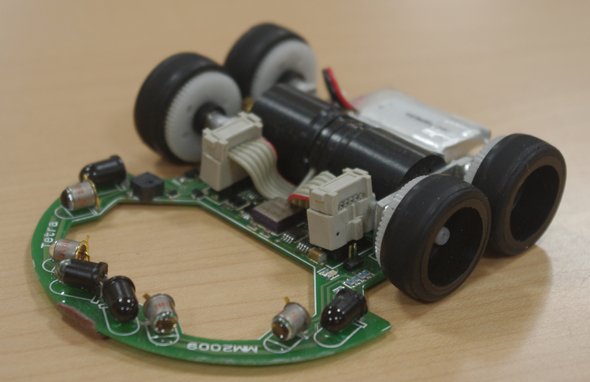 画像8 加藤雄資さんの「Tetra」
画像8 加藤雄資さんの「Tetra」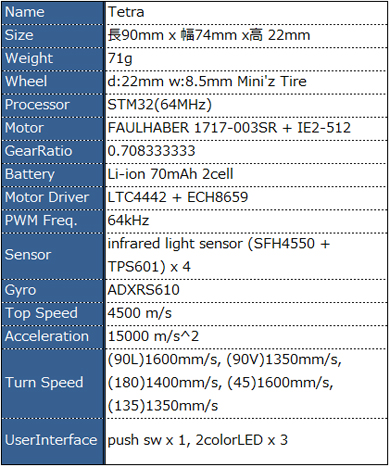 表2 「Tetra」のスペック
表2 「Tetra」のスペック製作者の加藤さんは学生時代からマイクロマウスに参加しており、2010年大会のエキスパートクラスで優勝したときには、「8年ぶりに日本人チャンピオン誕生!」と話題になった。今は、日本を代表するトップマウサー(マイクロマウス製作者を“マウサー”と呼ぶ)だ。ちなみに、2009年にスタートしたハーフサイズクラスの初代チャンピオンでもある。
社会人3年目の加藤さんに「学生時代と比べて、社会人になってからマイクロマウスの開発にどんな違いがでましたか?」と尋ねると、「信頼性と耐久性を重視するようになりましたね」(加藤さん)と即答。業務で身に付けた開発姿勢やスキルが、マイクロマウス競技に生きているようだ。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 周波数を使って熱電対センサーの測定値を安価な電線でより遠くまで伝送する
- 新画素構造で20%以上高精細化した1/2型モバイル用CMOSイメージセンサー
- TSMCの“Beyond 2nm”技術の現在地、「A14」で第2世代ナノシートトランジスタへ
- フィジカルAI搭載ロボットがモノポリーを実演、1台のPCにモーション制御も統合
- フィジカルAIに挑む日の丸連合、「Noetra」とは何か
- 数μmの傷を手で触って判別できる触覚増幅デバイス、デジタル化も視野に
- タムロンと大阪大学が薄型軽量で耐熱性に優れたMIM構造の近赤外光源を実用化
- SBOMで脆弱性管理を高度化する新システムを提供
- 陸上自衛隊から四足歩行型警備ロボットシステムの導入検証業務を受託
- 村田製作所が製品データ自動取得サービスの対象範囲を24倍に大幅拡大
コーナーリンク
よく読まれている編集記者コラム



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。