ハイレベルな制御戦略に会場も興奮、ETロボコン2009:ETロボコン2009、挑戦記(8)(2/3 ページ)
勝手に@IT MONOist賞
ETロボコン2009では、前ページで紹介した走行上位チームの表彰のほかにも、特別賞として最速タイム(1周を0分36秒台)をたたき出したロボコンやらないか(個人出場)や日韓の大学が共同で出場したJKフリップフロップ「九州大学福田・中西・久住研究室&忠南大学キムヒョンシン研究室」、そしてTOPPERS賞にプラットフォームでの工夫が見られたKTEC(九州技術教育専門学校)、デンマーク大使館イノベーション賞にIN/OUT両方ですべての難所を突破した、かねごん(日立情報通信エンジニアリング)が入賞した。
そこで誠に勝手だが、@IT MONOistでも賞を作ってみた(@IT MONOist賞としておこう)。とくに景品などはないのだが、チャンピオンシップ大会を見にこれなかった読者の方にもぜひ見ていただきたいチームとして、田町レーシング(オージス総研 組み込みソリューション部)を紹介する。
田町レーシングは、東京地区大会(1日目)でモデル1位、総合1位に輝いたチーム。地区大会後のインタビューでは、同大会で封印していた“バレリーナ走行”を披露すると宣言してくれていた。そして当日、その宣言通りにOUTコースのショートカット部分でとてもユニークなバレリーナ走行を成功。ボーナスポイントにはならないものの、会場を盛り上げてくれた演出力を評価したい。
バレリーナ走行の動画(解説入り)
バレリーナ走行の動画(競技会での成功シーン)
バレリーナ走行は、NXTの回転できるという点をうまく利用し、何か新しい走行ができないかという考えから生まれたいう。具体的には、点線部分でライントレースをすると(ラインを失い)コースを抜けてしまうので、抜けたときにそこで回転することで、もう一度同じ場所に戻ってくるという方法を取っている。
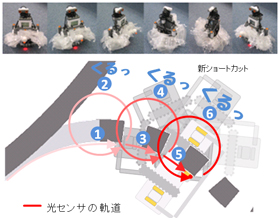
 (左)バレリーナ走行について/(右)田町レーシングのメンバー
(左)バレリーナ走行について/(右)田町レーシングのメンバー「苦労したのは、片方の車輪を止めて、回るというところ。片輪を止めないと軸が決まらず、1回転したときにどこに戻ってくるかが分からないが、片輪を止めておくことで、(回転角度)速度が多少変わっても、きれいな円移動ができる。ただし、倒立振子のライブラリは、片輪を固定するものが出ていないため、ライブラリを改変せずにどう実現するかが問題だった。最終的には、モータPWM出力値を算出している倒立振子制御ライブラリのロジックの仕組みを利用することで、ライブラリからの出力値を入力値にフィードバックし、片輪を止めている」(田町レーシング 手嶋 高明さん)
写真で紹介する、今年のETロボコン


 走行体もチャンピオンシップ仕様?(左から杜、ちーくま、ひものエンベダーズの走行体)
走行体もチャンピオンシップ仕様?(左から杜、ちーくま、ひものエンベダーズの走行体) 塗装はNGなど、いくつかの制限がある走行体の加工だが、シールならばOKということで、オリジナルのデザインに仕上げているチームがいくつかあった

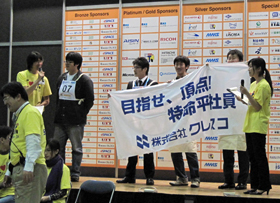 (左)ETロボコン史上初! 女性チームがチャンピオンシップ大会に。九州地区から女性のみで構成された華やかなチーム、とーんこっつ(アイシン・コムクルーズ)。モータを10個買い込み“エリートモータ”を選定するなど、タイムを縮めるための工夫をしていた。審査員からは「記憶に残る試合だった。モデルもよく描けている。女性チームという先入観なしに見て欲しい」とのコメント述べられた/(右)社内一丸となって応援! 特命平社員。ETロボコンに参加している企業チームの多くが、「社内での応援のおかげ」だと口を揃えていう。特命平社員(クレスコ エンベデッドソリューソンズ)も多くの社内応援者が見つめる中、奮闘した
(左)ETロボコン史上初! 女性チームがチャンピオンシップ大会に。九州地区から女性のみで構成された華やかなチーム、とーんこっつ(アイシン・コムクルーズ)。モータを10個買い込み“エリートモータ”を選定するなど、タイムを縮めるための工夫をしていた。審査員からは「記憶に残る試合だった。モデルもよく描けている。女性チームという先入観なしに見て欲しい」とのコメント述べられた/(右)社内一丸となって応援! 特命平社員。ETロボコンに参加している企業チームの多くが、「社内での応援のおかげ」だと口を揃えていう。特命平社員(クレスコ エンベデッドソリューソンズ)も多くの社内応援者が見つめる中、奮闘した審査委員長による大会の総評&走行について
 ETロボコン 本部・審査委員長の渡辺 博之氏
ETロボコン 本部・審査委員長の渡辺 博之氏ETロボコンチャンピオンシップ大会、2日目に行われたモデルワークショップの冒頭で、審査委員長の渡辺氏は、大会の総評およびモデル/走行それぞれの傾向について言及した。ここでは大会の総評と走行について紹介する。
「今年は参加者層が拡大した。特に学生チームの活躍が際立っており、各地区大会で学生チームが上位の成績を残している。後は女性チームやシニアチームの登場。走行については、逆走や独自のボーナスラインを通るなどの自在走行が出現し、難所が一般化した点が特徴として挙げられる。難所については、もはや難所ではないものもあり、NXTに関しては今回のコースでは簡単過ぎたともいえる」(渡辺氏)
「今年で最後のRCXは、長年課題になっていた灰色検知が今年は割とうまく攻略されていた。事前に速度を落とし、きっちりとマーカーを通るという方法だが、聞いたところによると、タイマーで制御しているチームが多いようだった。そのほかコアファイターが成功したトレジャーハントの新走路(一度戻らずに狭いすき間を走行)など、集大成にふさわしい形で終えられた」(渡辺氏)
モデルと走行の相関について
昨年度から取り入れられた総合審査方式。これはモデルと走行の相関を取ることで、例えばモデルはあまり良くないが走行がものすごく速いので総合結果が良かったというチームを出さないために導入されたものだが、今年の結果はどうだったのだろうか。渡辺氏によると「昨年の総合結果はわりと相関が取れていたが、今年は鈍化している。ただし上位チームについては昨年と同様に相関が取れている」という。その点については、「おそらくNXTが初めての年ということもあり、要素技術を中心に性能だけに注力したチームが多く、そこが割と走れたのでは」と分析した。

さらに来年に向けては「コースが難しくなれば、昨年のような傾向になっていくだろう」と述べ、「走行の内容自体は非常に良かった。このことを考えると、競技内容の再考も考えていく必要がある」とした。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 日本再起の旗印となるか、国産マルチモーダルAI基盤「FRONTia」が始動
- 大腸がんを低侵襲に治療できるESD、オリンパスが内視鏡ロボット技術で容易に
- TSMCの“Beyond 2nm”技術の現在地、「A14」で第2世代ナノシートトランジスタへ
- 既設光ファイバーで450Tbps伝送に成功、周波数帯域幅を従来の4倍以上に拡大
- NVIDIAが「Jetson Thor」に新モジュール追加、高騰するメモリの使用量削減技術も
- インテグレーション地獄からの脱却:構造問題と「インテグレーター人権宣言」
- 酸素供給スーツで3時間潜水するサイボーグ昆虫
- 製造業の設計開発と情シスの部門間にある「ダニング・クルーガー効果」の谷
- NVIDIAフアン氏が神田に現る――日本製造業巻き込む「ジャパンAI協業」祭り
- サブ1nm半導体チップ技術を発表、性能最大50%向上
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。