HILSによる故障診断機能のテスト(その2):いまさら聞けないHILS入門(12)(2/3 ページ)
回転センサーの異常
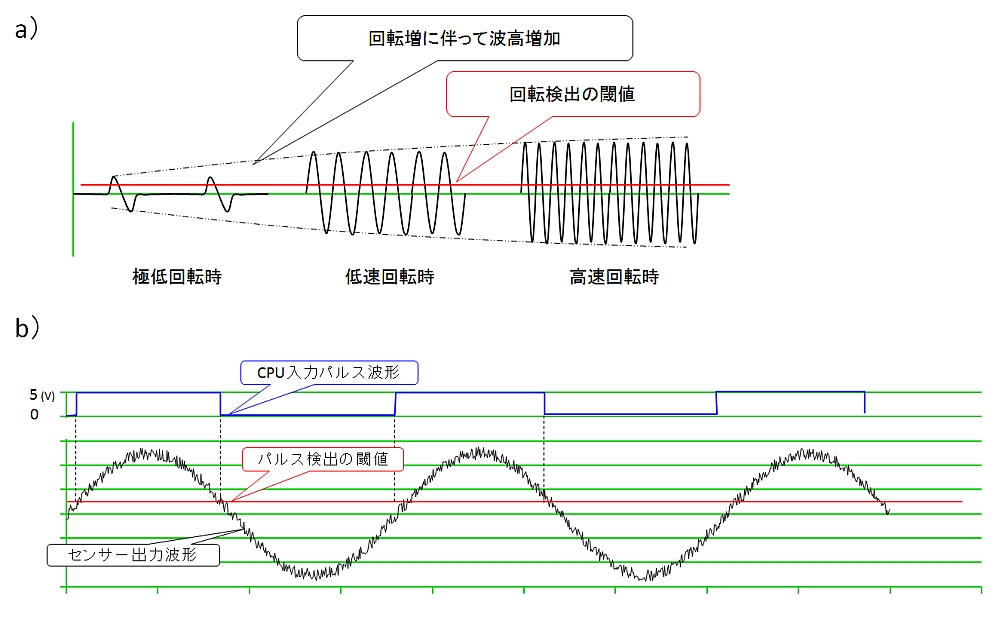
本編エンジンの回転センサーは、マグネットピックアップ形式としています。 センサー波形は、連載第3回の図5のように回転数に応じて電圧と周波数が大きく変化します。ECU入力は、これを波形整形してから周期や周波数を測定して回転数を検出しています。
検出要件を逸脱するような波形変化が生じて、ECUが正しく検出できない状態が生じるとセンサー故障となります。ここでは表2のような故障が考えられます。
| 番号 | 項目 | パルス波形の変化 | 故障内容 | |
|---|---|---|---|---|
| 正常 | 正常パルスを発生 図5(a) |
回転数に応じて出力電圧が大きくなるサイン波形(連載第3回の図5参照) | ||
| (1) | 故障 | 回路断線 | パルス消滅(導通なし) 図5(b) |
継続的な断線と断続的な断線がある。コネクター接触不良、センサーコイル断線、ハーネス断線など |
| (2) | 起電力低下(1) | 継続的なパルス電圧の低下 図5(c) |
コネクター接触不良による回路抵抗増加、ピックアップ磁力低下などにより、回転パルス起電力が低下する。始動クランキング中など極低回転時により顕著となる | |
| (3) | 起電力低下(2) | 周期的なパルス電圧低下(エンジン回転に同期) 図5(d) |
パルスリングの変形、偏心などによるセンサーギャップ変化で、パルスリングの1回転の中で周期的に起電力が低下する | |
| (4) | パルス欠損 | パルスが1個〜数個失われる 図5(e) |
異物の挟み込みなどで、パルスリングの歯欠けが生じると、その部分のパルスが失われる | |
| (5) | 電磁ノイズ混入 | パルス過多 | 近接の他機器発生の電磁ノイズが、センサーハーネスや電源・グランド回路を経由して、高周波ノイズとして混入。ノイズ源から常時混入する場合と、まれに不特定のノイズ源から混入する場合がある | |
| 表2 回転センサーの故障 | ||||

HILSインタフェースで回転センサー故障を実現する
断線の場合は、信号が完全に失われるので省略します。それ以外の故障の一例として、表2(3)のパルスリングが変形して、回転センサーとのギャップがパルスリングの1回転の中で変化するケースを考えてみましょう(図6)。

センサーギャップが正規の値より大きくなると、パルスリングを通過する磁力線が低下してセンサー起電力低下し、パルスリング1回転の中で回転波形が低下する現象が起こります。センサー起電力の最低値がECUのパルス波形検出の閾値以下になると、その部分のパルスを検出できなくなりパルス欠損を生じます。その結果、検出される回転数が実回転数よりも小さくなる不具合が生じます。
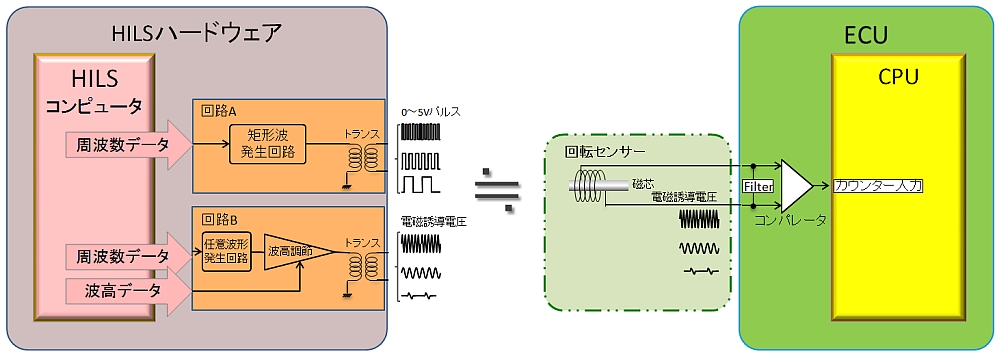
HILSでこの故障を実現するには、インタフェースから出力するセンサー波形を単純な一定電圧の矩形波やサイン波形でなく、波形の大きさを可変にして回転数やセンサーギャップを反映する仕組みが必要です。
具体的には、連載第3回の図6(B)に示すような仕組みが考えられます。ここで、波高を調節するアンプに起電力変化の波形を入力することにより、故障波形を発生することができます。図5の波形パターンの故障波形ファイルを準備して、図7のHILS-UI上で選択して切り替えることによって、正常波形を含む各種の故障波形を出力できます。

Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



{kind=link}
{kind=link}
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。