現実を超えた仮想環境へ、自動運転時代に向けた最新モデルベース開発ツールを一挙紹介:dSPACEが切り開く
クルマは、安全性や快適性を格段に向上させる「運転補助」のレベルから、本格的な「自動運転」の時代に突入しようとしている。これに伴い、クルマの制御システムは、一段と高度で複雑となる。モデルベース開発(MBD)ツールを提供するdSPACEは、新たに必要となる自動運転機能を効率よく開発できるよう、最新技術を搭載したエンドツーエンドのツールチェーンを用意している。
自動運転は、運転者支援の「レベル1」から無人運転の「レベル5」まで5段階が定義されている。ほぼ完全な自動運転といわれるのは「レベル4」からである。多くの自動車メーカーやモジュールメーカー、部品メーカーは既に、このレベル4に対応する自動運転車の実現に向けて開発を加速している。
クルマの電子化が進展するにつれ、搭載されるシステムは大規模で複雑となり、高度な制御技術が要求されるようになった。これらのシステムを効率よく開発するために、かつてはいくつかの機能ブロックを個別に開発し、最後にこれらを統合して検証する開発フローが採用されてきた。しかし、検証/評価の工程を最終段階で行うと、不具合が見つかった時に手戻りが発生することも多く、開発の期間が延び費用も増加するなど課題となっていた。
そこで注目されたのが、モデルベース開発(MBD)手法である。クルマの開発工程にシミュレーションモデルを活用することにより、ECUや制御プログラムなどの開発を終えた時点で、仮想環境による検証を行うことができる。この手法を採用することで、設計の初期段階から完成度を高めることができ、設計の手戻りを防ぐことが可能だ。このような背景からMBDは自動車開発現場で広く普及しつつある。
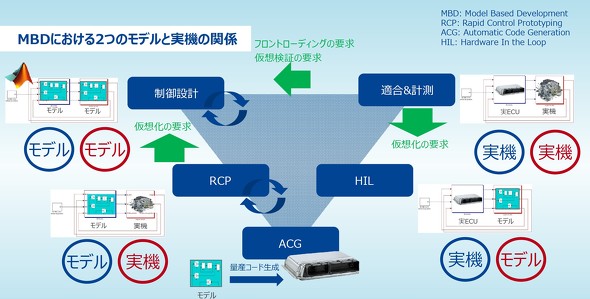 モデルベース開発(MBD)手法による設計フロー。仮想環境のモデルと実機を組み合わせ、開発効率を高める
モデルベース開発(MBD)手法による設計フロー。仮想環境のモデルと実機を組み合わせ、開発効率を高めるそして、昨今急速に実現に向けて開発が進む自動運転車では、カメラやレーダーなど環境センサーECUの搭載数が増え、飛躍的にテスト工数も増えていくことになる。そのため、MBDの必要性も高まっていると同時に、MBDを実現するMBDツールに対し、より高度な機能、高い性能が求められつつある。
例えば、これまでのMBDツールには、実環境と同じ速度で仮想環境上のモデルを動作させるリアルタイムシミュレーション性能が求められた。しかし、飛躍的にテスト工数が増える自動運転時代では、リアルタイムでは時間的に間に合わず、リアルタイムよりも速い速度でのシミュレーションが求められつつある。
そうした中で、自動車開発のあらゆるテスト工程に対し、シミュレーションを実現するMBDツール群をシングルソースで提供するdSPACEは、自動運転時代に向けて、MBDツールのさらなる進化を図るとともに、MBDツールのラインアップを拡充している。
ASM Traffic:センサーRaw Dataを生成、認知アルゴリズムまでテスト可能に
dSPACEのツールチェーンの中核を担う「ASM」(Automotive Simulation Models)も自動運転時代に向けて、進化を遂げている。ASMは、「エンジン制御」や「ビークルダイナミクス制御」「車載パワーエレクトロニクス」および、「交通環境」の領域をカバーするツールスイートで、全てのモデルがMATLAB/Simulinkで実装される。組み合わせ可能な自動車用コンポーネントモデルであり、乗用車やトラックの仮想車両を作成することもできる。また、カスタムモデルの追加や既存モデルとの置き換えなど、拡張性にも優れたツールである。
このツールスイート「ASM」を構成するシミュレーションモデルとして、トラフィック(交通流)と環境シミュレーション機能を追加するための「ASM Traffic」は、自動運転車開発において、ECUのHiL(Hardware in the Loop)テストやコントローラのアルゴリズム検証には不可欠なモデルになると目され、大きな注目を集めている。
ASM Trafficは極めて柔軟性が高いという特長がある。テスト車両(自車)に対して、周囲を走る車両の割り込みなど、さまざまなトラフィックシナリオを作成して、検証することができる。また、グラフィカルユーザーインタフェース(GUI)により、複雑な道路網や道路標識、交通車両、センサーなどのコンポーネントを定義するために用いる複数のインタフェースが提供される。事故データベースの取り込みや交通流シミュレーターとの連携なども可能だ。
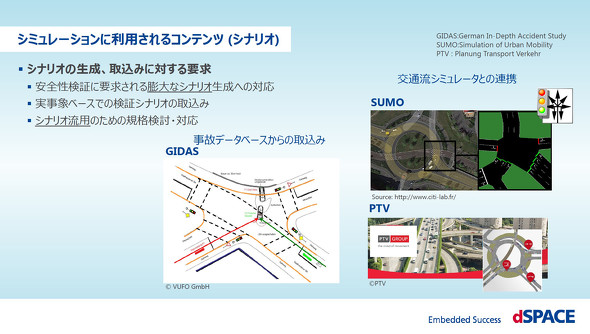 「ASM Traffic」は、各種トラフィック(交通流)シミュレーターや事故データベースなどと連携し、テストシナリオを生成。仮想空間にさまざまな自動車の周囲環境を構築できる
「ASM Traffic」は、各種トラフィック(交通流)シミュレーターや事故データベースなどと連携し、テストシナリオを生成。仮想空間にさまざまな自動車の周囲環境を構築できるASM Trafficは、運転操作に応じて全ての車両や物体、歩行者などの軌跡を、リアルタイムに計算することができる。トラフィックシナリオは容易に修正することができ、さまざまなテストシナリオでシミュレーションを繰り返し実行することも可能だ。将来は、実際にカメラで撮影した映像を利用して検証を行うことも検討されているようだ。
従来の一般的なECUを開発する工程では、加速度や圧力、温度といった信号を入力し、処理結果に応じてアクチュエーターを動作させるテストが主流であった。ところが、高度な自動運転を実現しようとすれば、これらの信号とは別に、カメラやレーダー、ライダー(LiDAR)などのセンサー情報が追加される。これらの情報を用いて道路網やテスト車両、周辺車両などの交通環境をリアルタイムにシミュレーションする必要がある。
環境シミュレーションを実行するには、いくつかの処理ステップがある。例えば、カメラやレーダー、LiDARで得られる情報(=Raw Data)は、収集後にデータ処理やデータ融合などを行い、それが白線や障害物であることを認識した上で、座標軸のデータを後段のコントローラに出力する。その後、アプリケーションソフトウェアで次の動作に向けた判断や意思決定を行い、ハンドルやブレーキなどを自動的に操作して、車両を適切に制御する。
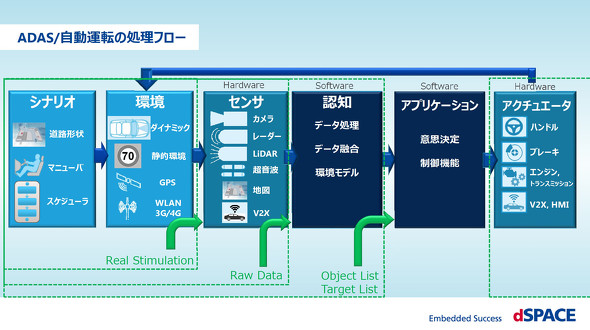 ADAS/自動運転システムの処理フロー。従来、MBD手法が用いられる領域は「オブジェクトリスト」や「ターゲットリスト」生成後のアプリケーション領域に限られたが、「ASM Traffic」は、センサーが出力する信号(Raw Data)も生成することが可能で、センサー出力から物体検知などを行う認知アルゴリズムについても、MBD手法による検証が行えるようになった。
ADAS/自動運転システムの処理フロー。従来、MBD手法が用いられる領域は「オブジェクトリスト」や「ターゲットリスト」生成後のアプリケーション領域に限られたが、「ASM Traffic」は、センサーが出力する信号(Raw Data)も生成することが可能で、センサー出力から物体検知などを行う認知アルゴリズムについても、MBD手法による検証が行えるようになった。ただ、これまでの環境シミュレーションでは、「オブジェクトリスト」や「ターゲットリスト」と呼ばれる、白線などを認知した後のデータしか提供されなかった。この情報だと、カメラなどで捉えた情報を用いて、白線などを認知するための認知アルゴリズムを検証することはできない。
これに対しASMでは、カメラなどのセンサーの出力と同様のRaw Dataを生成することが可能だ。すなわち、ASMがセンサーに成り代わって、さまざまなテストシナリオに応じたRaw Dataを出力するため、自動運転システムの1つの肝である物体検知する認知アルゴリズムのテストにMBD手法を適用できるようになったわけだ。
dSPACEでは、ASM Trafficとともに、認知アルゴリズムが動作するさまざまなデバイスにRaw Dataを入力するための汎用的なハードウェア(治具)も用意している。「これまでは、テスト対象がECUレベルで、CANやLINなどのインタフェースに対応したハードウェアで良かった。だが、Raw Dataを入力する場合、デバイスレベルのさまざまなインタフェースに対応したハードウェアを新たに用意する必要がある。そこで、当社では、さまざまなRaw Dataの伝送用インタフェースに対応するハードウェアをそろえており、多様なアプリケーションに対応できるという点も大きな特長だ」(dSPACE)としている。
「DARTS」:車載レーダーセンサーをテスト
ASM Trafficにより、認知アルゴリズムの開発までMBD手法をできる環境が整ったわけだが、dSPACEでは、認知アルゴリズムの前段に位置するセンサーについても、MBD手法を導入できるツールの提供を開始している。
それが、車載ミリ波レーダーセンサーのテストツール「DARTS(dSPACE Automotive Rader Test Systems)」だ。
ミリ波レーダーは、直線性に極めて強く、雨や霧、雪といった耐環境性に優れているという特長を持ち、クルマ前方にある車両や障害物、移動する歩行者との距離測定などを高い精度で行うことができる。このため、重大な事故を回避するための機能として車両への搭載が進んでいる。
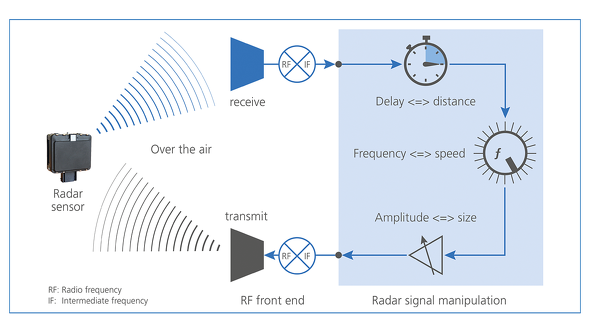
 車載レーダーセンサーのテストツール「DARTS」の製品イメージ。レーダーセンサーから発されたレーダーを、DARTSは受信し、テストシナリオに応じた反射波に変換して、レーダーセンサーに送る
車載レーダーセンサーのテストツール「DARTS」の製品イメージ。レーダーセンサーから発されたレーダーを、DARTSは受信し、テストシナリオに応じた反射波に変換して、レーダーセンサーに送るDARTSは、より安全な自動運転を実現するために欠かせない車載センサーの一つであるミリ波レーダーセンサーを、定義したシナリオに基づいてテストするための製品ファミリーである。可動式の複数の送信/受信モジュールを組み込んだ大型システムから、拡張性にも優れているミリ波の送受信部を固定とした単体モジュールまで展開している。シミュレートするエコーの数は、筐体の並列化や組み合わせによって、増やすことが可能である。これによって、道路交通において生じるオブジェクトの反射を、さまざまな距離や速度、サイズでリアルタイムにシミュレートすることができる。シミュレートするエコーの数は、筐体の並列化や組み合わせによって、増やすことが可能である。これによって、道路交通において生じるオブジェクトの反射を、さまざまな距離や速度、サイズでリアルタイムにシミュレートすることができる。
具体的な動作原理はこうだ。レーダーセンサーからの信号をDARTSが受信し、内部エコーを生成してセンサーに信号を戻す。この時、定義されたテストシナリオに基づき、検証したい距離に応じて受信した信号を遅延させたり、反射エネルギーを減衰させたりして信号を返す。方位角を決めるときは、受信モジュールや送信モジュールを任意の位置に移動させて計測する。
 DARTSの動作イメージ。レーダーセンサーの信号を受信し、テストシナリオに応じて、信号を遅延させたり、減衰させたりして、レーダーセンサーにレーダー信号を発する
DARTSの動作イメージ。レーダーセンサーの信号を受信し、テストシナリオに応じて、信号を遅延させたり、減衰させたりして、レーダーセンサーにレーダー信号を発する「DARTS-9030-MS」製品は、シミュレーション可能な距離が最小0.6mである。最大1000mまで対応し、10cmのステップサイズで調整することが可能だ。最大4つの独立したエコーをシミュレートできるデスクトップ型の製品「DARTS-9510-C」だと、最大3600mの距離まで対応することができる。
24GHz、76.5GHz、79GHzという主な周波数帯のレーダーに対応し、各周波数帯レーダーの切り替えも容易である。動的かつ連続的に角度シミュレーションが行えるテストベンチなども拡張オプションで用意した。これにより、クローズドループ動作におけるレーダーセンサーのテストを行うことができる。
これらの製品は、レーダーセンサー単体やECU単体のパフォーマンステスト、信号処理とアプリケーションソフトウェアを統合したセンサーモジュールにおけるシナリオベースのテスト、実装場所の影響などを考慮したテストなどに向ける。
「SCALEXIO LabBox」:デスクにおけるコンパクトサイズ
自動車開発の隅々までカバーするMBDツールチェーンを提供するdSPACEでは、ASM Trafficなどシミュレーションモデルを実行するためのハードウェア製品の強化も進め、大規模なハードウェア製品から、小型ハードウェア製品までをそろえている。
直近では、HiLテスト、ラピッドコントロールプロトタイピング(RCP)、データ収集/モニタリング、テストベンチなどの用途に利用できるモジュール型リアルタイムシステム「SCALEXIO」でデスクトップバージョンのラインアップを拡充した。
 モジュール型リアルタイムシステム「SCALEXIO」のデスクトップバージョン。18枚のモジュールが挿入可能な19スロットタイプ(左)に加え、このほど、より小さな8スロットタイプ(右、7モジュール挿入可能)が登場した
モジュール型リアルタイムシステム「SCALEXIO」のデスクトップバージョン。18枚のモジュールが挿入可能な19スロットタイプ(左)に加え、このほど、より小さな8スロットタイプ(右、7モジュール挿入可能)が登場したSCALEXIOは、さまざまな種類のモジュールが用意され、モジュールを差し替えるだけで、多様なテスト/開発環境を実現できる“柔軟性”が特長。デスクトップバージョン以外にも、多数のモジュールを使用できるラックバージョンまであり、広範囲のテスト/開発規模に対応する。モジュールとしては、「Intel Xeon」など高性能プロセッサを実装したプロセッサユニット/ボード、FPGAを備えた高速I/Oボード、高速A-D変換ボード、各種の通信インタフェース用ボードなどが用意されている。
「自動運転時代に向け、さまざまなニーズに応えるMBDツールチェーンを開発、提供していく。dSPACEのツールチェーンは全て、リアルタイム性能を発揮するという特長を持ってきた。今後は、より一層、強力なハードウェア製品などを開発し、リアルタイムを超えた性能を発揮するツールチェーンを提供し、自動運転時代の自動車開発に貢献したい」としている。
「自動運転」や「電動化」に対応
なお、dSPACEは、「人とくるまのテクノロジー展2019横浜」(2019年5月22〜24日、パシフィコ横浜)に出展し、「自動運転」や「電動化」に対応したMBD製品/ソリューションを紹介する。
 人とくるまのテクノロジー展におけるブースイメージ
人とくるまのテクノロジー展におけるブースイメージ会場では、これまで紹介してきた、ASMにトラフィックと環境シミュレーション機能を追加するためのシミュレーションモデル「ASM Traffic」や、モジュール型リアルタイムシステム「SCALEXIO LabBox」、車載レーダーセンサーのテストベンチ「DARTS」などを中心にデモを交えて紹介する。
この他、マルチセンサーアプリケーション向けプロトタイピングツール「RTMaps」とプロトタイピングユニット「MicroAutoBox Embedded SPU」を組み合わせてLiDARの動作を検証するデモなども披露する予定だ。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
提供:dSPACE Japan株式会社
アイティメディア営業企画/制作:MONOist 編集部/掲載内容有効期限:2019年6月6日
Presented by
関連記事

モデルベース開発(MBD)ツールの代表的なベンダーであるdSPACE。その豊富な製品から構成されるECU開発プロセスを網羅するモデルベース開発ツールチェーンをベースに、加速するADAS(先進運転支援システム)/AD(自動運転)の開発現場を中心に売り上げ実績を伸ばしている。そして2019年は、実績ある自動車市場に加えて、農機/建機やロボット市場での活動を強化し、幅広い用途でのモデルベース開発の普及を目指すという。dSPACE Japan社長を務める宮野隆氏に事業戦略を聞いた。
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。