安心安全なコネクテッドカーを世に出すには、現実解は半導体が知っている:車載半導体
V2Xを活用した自動運転、クラウド連携やエッジ・コンピューティング、ソフトウェア更新技術を、自動車で最適に動作させるため、自動車のシステム構造が変化を迫られている。NXPの三木務氏が安心安全なコネクテッドカーの実現に向けた取り組みを語る。
自動車業界のメガトレンドである「CASE(Connected、Autonomous、Shared、Electric)」の実現に向けて、自動車のシステム構造が大きく変わろうとしている。
これまではセンサーが検知できる範囲のみで環境を認識する自律型の運転支援が主流だったが、自動運転を実現させるためにはV2X(Vehicle to X)が不可欠となる。また、リアルタイムに大量のデータを処理する上ではクラウドとの連携に加え、エッジ・コンピューティングが欠かせない。クルマが販売された後も機能を向上させ続けるためのソフトウェア更新技術も重要だ。これらの機能が効率よく最適に動作するため、自動車のシステム構造は変化を迫られているのだ。
 NXPの三木務氏
NXPの三木務氏半導体メーカー各社がこうした進化に対応する体勢を整えている。NXP Semiconductors 副社長兼NXPジャパン 車載営業・マーケティング本部 本部長の三木務氏は、「Sense、Think、Actのそれぞれのマトリクスの中で異なる半導体が求められるが、NXPはほとんど全てを提供できる唯一のベンダーだ」と語る。
MONOist編集部の主催で2018年12月14日に大阪市内で実施した読者向けセミナー「『つながるクルマ』が変えるモビリティの未来〜MONOist Future Mobility Forum〜」で、三木氏が語った、安心安全なコネクテッドカーの実現に向けた取り組みを紹介する。
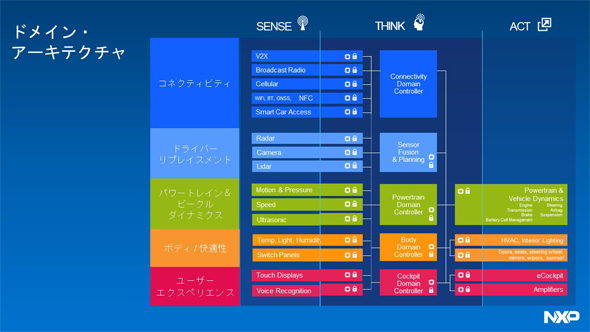 自動車に求められるSense、Think、Actの全てカバーする包括的なポートフォリオ 出典:NXP
自動車に求められるSense、Think、Actの全てカバーする包括的なポートフォリオ 出典:NXPECUはドメインごとに整理される
自動運転、電動化、コネクティビティといったメガトレンドに伴ってデータ量が増加し、処理性能や広帯域化に課題が出てくる。1台の車両が生成する1時間あたりのデータ量は、2015年には0.2TBであったものが、2025年には20TB以上に増大する見込みだ。同様に、要求される車載コンピュータの処理性能は0.2TFLOPSから100TFLOPS以上に、車載ネットワークに求められる帯域幅は100Mbpsから10Gbps以上に高まる見通しだ。
ECU搭載数は増加する一方だが、これに伴い複雑化やコスト増、ハーネスの重量増といった課題があり、システムの統合化、そして簡素化が求められている。このような背景により、開発効率、機能拡張に対するフレキシビリティ、アップデートのしやすさ、そしてセキュリティを高めることが可能になるドメイン・アーキテクチャへの移行が始まりつつある。
NXPは自動車のエレクトロニクスを機能ごとにまとめ、ドメインを定義している。各ドメインをドメインコントローラーが統括し、その上位にゲートウェイが置かれるシステムを想定する。具体的には、BluetoothやWi-Fi、将来の5Gなど通信を担当する「コネクティビティ」、エンジンやブレーキなど「パワートレイン」、灯火類やドア、ミラーなどを管理する「ボディー」、インフォテインメントなどの「ユーザー・エクスペリエンス」、そして運転支援や自動運転のため各種センサーの情報を処理する「ドライバー・リプレイスメント」の5ドメインを定義している。
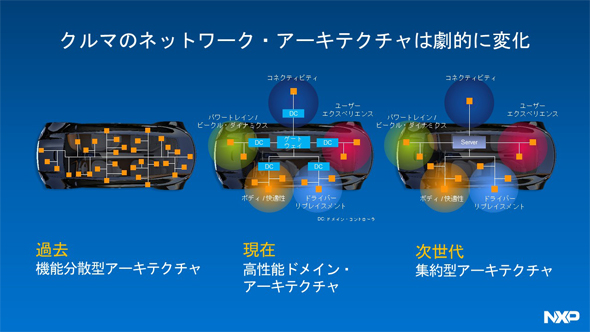 アーキテクチャはドメインごとに集約された後、さらにECU統合が進んだシングルブレインのアーキテクチャに進む 出典:NXP
アーキテクチャはドメインごとに集約された後、さらにECU統合が進んだシングルブレインのアーキテクチャに進む 出典:NXP今後は、「ドメインコントローラーやゲートウェイを1つのサーバに統合した、シングルブレインのアーキテクチャの方向に開発が進む」と三木氏は説明する。こうした進化の中で、高性能なCPUの採用に加えて、マルチギガビットイーサネットが自動車にも導入されていくと見ている。
V2XはセルラーとDSRCのハイブリッドに
車車間(V2V)や路車間(V2I)、歩車間(V2P)の通信技術であるV2Xは、「普及が想定よりも遅れている」(三木氏)というのが現状だ。米国での規制策定が遅れており、その他の各国も同様だ。
ただ、自動車メーカーはV2Xを実装した車両を各地域に展開する計画を進めている。米国ではGeneral Motors(GM)が2017年から展開しており、トヨタ自動車も2021年から対応した車両を投入する方針だ。欧州ではVolkswagen(VW)がリードしている状況で、2019年から市場投入が始まる。中国は明確な規制が出てきていないものの、5Gの普及をにらみ、携帯電話通信網を使う「C-V2X(セルラーV2X)」に向けて動いているという。
現在は、DSRC(狭域通信:Dedicated Short Range Communications)を使ったV2XとC-V2Xの2つの技術で開発が進められている。三木氏はC-V2Xは通信の遅延時間が課題であり、通信料金の負担の在り方を検討することも必要だと指摘。また、同氏はDSRCのV2XとC-V2Xは“ハイブリッド”で併用され、アプリケーションごとに使い分けていく方向に進むと見込んでいる。
V2Xに関しては各国でさまざまな企業が参加した実証実験が行われている。NXPも実証実験に参画しており、異なる地域の標準をサポートするグローバルなプラットフォームも提供している。現在は、2チャンネルのトランシーバーとモデムのファンクション、プロトコル制御を行うArmコアを1チップに収めたV2Xモデム「SAF 5400」をサンプル出荷している。車両に実装して性能を検証するための評価キットや、日米欧の各地域で必要な通信プロトコルのソフトウェアも併せて提供している。
 NXPのV2Xソリューション 出典:NXP
NXPのV2Xソリューション 出典:NXP自動車のエッジ・コンピューティング実現に向けて
自動車向けにもさまざまなクラウドサービスの開発が進められている。自動車メーカーやサプライヤー、サービス事業者は、自前でクラウドコンピューティングのサーバを持つこともあるが、IT企業が提供するクラウドWebサービスやパブリッククラウドサービスを使うケースが増えている。三木氏は「半導体メーカーもこれらのサービスとつなぐための環境を整えることが求められている」と説明した。
コネクテッドカーが生み出す大量のデータを高速に処理し、リアルタイムに活用する上で、全てをクラウドで処理するのではなく、クルマの中にエッジ・コンピュータを設け、エンドノードで大量に生成されるデータを処理するのがエッジ・コンピューティングだ。例えば、ドライバーを識別するための顔認識システムでは、学習はクラウドで行い、学習結果のパラメータをエッジ・デバイスにダウンロードする。以降の顔認識はエッジ・デバイスで処理することでリアルタイム制御が可能になるようなシステムが想定される。
NXPはこうしたエッジ・コンピューティングに向けて、あらゆるクラウドサービスとの連携を容易に構築できる「EdgeScale」というソフトウェアパッケージを提供することで、アプリケーションやセキュアデバイスのマネジメントを容易に行えるようにする戦略だ。
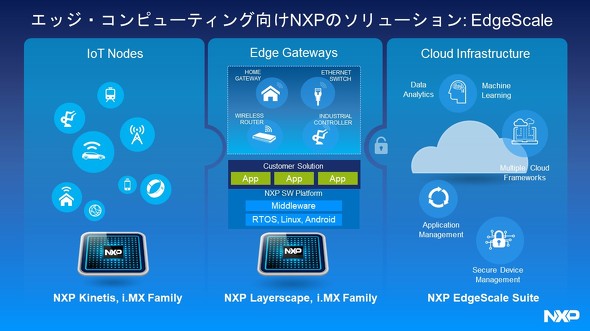 NXPが提供する「EdgeScale」のソリューション 出典:NXP
NXPが提供する「EdgeScale」のソリューション 出典:NXPEdgeScaleはパブリッククラウドサービスとの接続やデバイスマネジメントを行うためのライブラリだ。また、Webサービスにつなぐためのフレームワークを提供するだけでなく、製造から実装、アプリケーションの展開まで一連のオペレーションを確実かつ安全に行えるようにするソフトウェアライブラリも提供する。
複数のレイヤーでセキュリティを提供
クルマがクラウドサービスやV2Xなどで車外とつながることで、サイバー攻撃によるさまざまな脅威が発生する。攻撃にはECUや車両を対象にしたローカルアタックと、複数の車両を狙うリモートアタックがある。
ローカルアタックでは、リバースエンジニアリングで車載半導体を解析してカギを盗むことや、スマートキーの電波を傍受するリレーアタック、オドメーターの改ざんなどが問題になっている。それに加え、クルマが車外とつながることで遠隔から複数のクルマを対象にした攻撃が可能になる。このリモートアタックはさまざまな自動車メーカーの量産モデルを対象に、ハッキング事例が報告されている。
これに対し、三木氏は「NXPでは、複数のレイヤーをカバーするマルチレイヤーのセキュリティを提供する」と説明。車外インタフェース、ゲートウェイ、車内ネットワーク、個々のセキュアなMCU/MPUに、クルマの鍵である物理的なセキュリティを加えた「4+1」のアプローチをとる。
NXPは既に幾つかのセキュリティ・デバイスを提供中で、セキュリティ全体を分析するコンサルテーションも行う。「デバイスでは、MCU/MPUの新しい製品は全てセキュリティを搭載。カギを盗むのを難しくする耐タンパー性を持たせたセキュア・エレメントや、CANやイーサネットのデバイス、スマートキーのデバイス、V2X向けの半導体でセキュリティを提供している」(三木氏)。同社は車載プロセッシング・プラットフォームの「S32」で「コモンシャシー」というコンセプトでセキュリティ機能の共通アーキテクチャを提案することで、さまざまな用途のマイコンファミリーに展開している。
CAN通信の安全性を高める取り組みも進めている。「セキュアCANトランシーバー」は、CANメッセージIDのフィルターを持たせ、不正なIDがCANネットワークに入り込んだり、ホスト側から不正なIDが送信されたりするのを防ぐ。また、大量のデータをCANネットワークに流すDoS攻撃やなりすましが起きた時に、メッセージの転送頻度を検証して、対象のECUを一時的にネットワークから切り離す機能も提供している。
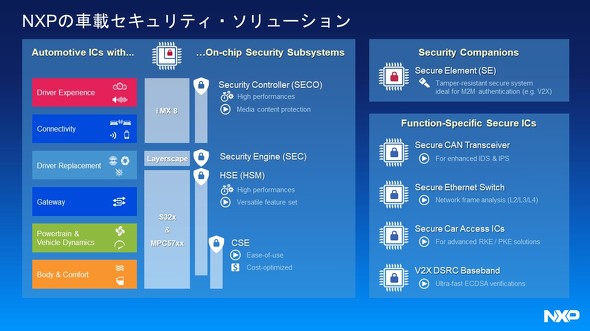 NXPがそろえる車載セキュリティのソリューション 出典:NXP
NXPがそろえる車載セキュリティのソリューション 出典:NXP関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
提供:NXPジャパン
アイティメディア営業企画/制作:MONOist 編集部/掲載内容有効期限:2019年3月11日
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。